Simcenter STAR-CCM+ 使用宿主网格单元方法检测碰撞。仅当两个粒子束位于同一网格单元中时才能发生碰撞。Simcenter STAR-CCM+ 用以下碰撞算法中速度较快的一种检测任何特定网格单元中的碰撞。以下算法可用:
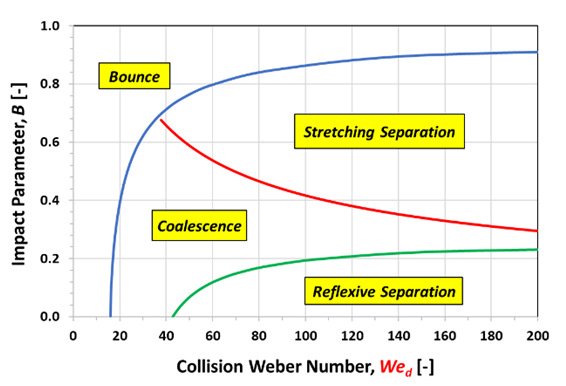
在两个液滴之间检测到碰撞后,可能会产生不同的碰撞结果:反弹、聚结、反射分离和延伸分离(擦边碰撞)[659]:
这种实施会忽略在高碰撞韦伯数下可能形成的卫星液滴。
碰撞结果由三个无量纲参数表示:
- 碰撞韦伯数
如下:
图 1. EQUATION_DISPLAY
(3142)其中,
为液滴 1 和 2 的平均表面张力,
为平均密度。相对速度
如下:
图 2. EQUATION_DISPLAY
(3143)其中,
和
为碰撞液滴的速度,
和
为其对应的半径。
碰撞韦伯数还可以根据较小液滴的直径
定义,相对于以下公式中给出的
:
图 3. EQUATION_DISPLAY
(3144)
- 冲击参数
如下:
图 4. EQUATION_DISPLAY
(3145)其中,
计算为从一个液滴的中心到放置在另一个液滴的中心上的相对速度矢量的距离。当
时,碰撞为正面碰撞。当
时,液滴彼此几乎不擦边。
- 液滴尺寸比率
如下:
图 5. EQUATION_DISPLAY
(3146)
- 碰撞 Ohnesorge 数
定义为:
其中
为碰撞液滴的平均动力粘度。
碰撞结果可以通过碰撞结果图表示,具体取决于影响参数
和碰撞韦伯数
。根据它们在碰撞结果图上的位置,液滴相互反弹(简单反弹或反射分离)、聚结或相互擦边(延伸分离)。曲线的常规形状可以随不同尺寸比参数以及液滴粘度等其他物理属性而变化。
Simcenter STAR-CCM+ 中实施了三个碰撞结果图。O'Rourke 图 ([678]、[671])、Ashgriz 图 ([645]) 和复合图。
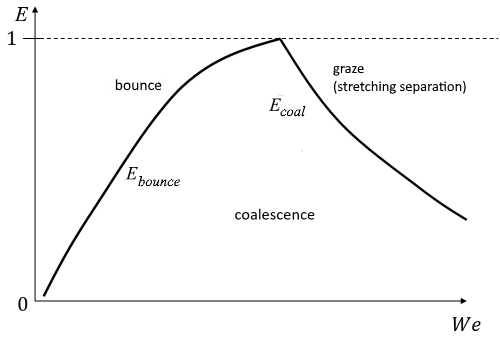
O'Rourke 和 Ashgiz 图绘制碰撞效率
与碰撞韦伯数
,通过 Eqn. (3142) 根据平均液滴直径为每对相互作用液滴计算。碰撞效率
是由获得给定结果的概率定义的 (
)。这两个图中的任何一个均不包含粘性耗散导致的能量损失效应。
- O'Rourke 图
- O'Rourke 图考虑了反弹、聚结和延伸/擦边分离模态。
- Ashgriz 图
- Ashgriz 图考虑了聚结、反射分离和延伸/擦边分离模态。
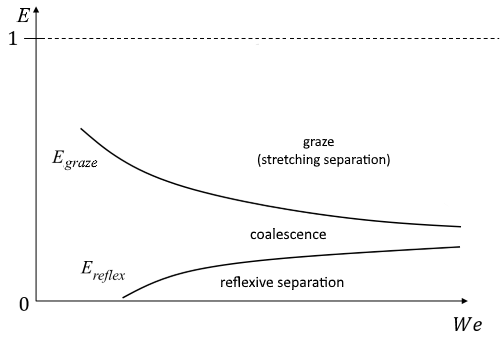
聚结区域的边界由曲线 和 或 和 表示。
对于每条 曲线:
图 6. EQUATION_DISPLAY
(3147)其中 、 和 是用于将 曲线拟合到数据的经验常数。
这些常数的默认值为:
|
|
O'Rourke |
Ashgriz |
|
|
|
|
|
-1.0 |
|
|
|
|
1.0 |
1.0 |
1.0 |
0.005 |
|
0.0 |
0.0 |
0.0 |
20 |
液滴直径比率修正定义如下:
图 7. EQUATION_DISPLAY
(3148)其中, 为液滴大小比。常数的默认值为:
使用上表中列出的 O'Rourke 的默认值,对于碰撞和聚结的这些公式的 Eqn. (3147) 的 和 减少:
图 8. EQUATION_DISPLAY
(3149)图 9. EQUATION_DISPLAY
(3150)以下流程图描述了整体碰撞动力学 O'Rourke 算法 [671]:
为 [0,1] 范围内的随机数。
对于 O'Rourke 和 Ashgriz 方法,如果发生聚结,可以通过查找 的值来确定每个液滴发生的聚结次数 ,且
图 10. EQUATION_DISPLAY
(3151)其中, 为发生 次碰撞的概率,由 Eqn. (3176) 给出。
发生聚结时,较稀疏粒子束中的液滴数量将从较密集的粒子束中减去。如果结果为擦边碰撞或反弹,则每个液滴仅计算一次碰撞。液滴的碰撞后速度、温度和质量将基于质量、动量和能量守恒进行计算。
- 复合图
- 复合图提供三条边界曲线的模型。用于反弹的 Sommerfeld 模型、用于延伸分离的 Suo-Jia 模型和用于反射分离的 Ashgriz 模型。
- Sommerfeld
- 此模型基于 Hu 等方法 [664],其中在临界碰撞韦伯数中考虑了能量平衡中的粘性耗散效应。
图 11. EQUATION_DISPLAY
(3152)其中:
-
-
为能量耗散因子
-
为与碰撞过程中液滴变形程度相关的形状因子。
Sommerfeld ([709]、[705]) 方法通过适应具有不同粘度的可用数据,自动适应
和
,通过
(对于纯液体)和
(对于溶液)进行限制。参数
和
假设为
的线性函数。
-
图 12. EQUATION_DISPLAY
(3153)图 13. EQUATION_DISPLAY
(3154)
-
图 14. EQUATION_DISPLAY
(3155)
这些常数的默认值为:
| 常数 |
|
|
|
|
|
| 纯液体 |
0.82 |
-4.03 |
10.93 |
-9.6 |
0.31 |
| 溶液 |
0.725 |
-10.2 |
52.5 |
-87.7 |
0.0834 |
| 常数 |
|
|
|
|
|
| 纯液体 |
3.9 |
-4.32 |
12.4 |
-11.7 |
3.4 |
| 溶液 |
3.76 |
-6.05 |
18.31 |
-18.25 |
3.1 |
|
|
|
|
|
|
| 0.07 |
5.24 |
-19.6 |
22.6 |
0.5 |
对于迎头碰撞 (B = 0),临界韦伯数为
。
- Suo-Jia
- 用于延伸分离的 Suo 和 Jia ([710]) 模型仅包括无量纲参数,由以下公式给出:
图 15. EQUATION_DISPLAY
(3156)其中 a 为 Ohnesorge 数和液滴尺寸比的函数,由以下公式给出:
图 16. EQUATION_DISPLAY
(3157) 常数的默认值为:
-
-
-
此相关性适用于:
- Ashgriz
- Ashgriz 方法分离临界韦伯数的反射分离和聚结模态。
图 17. EQUATION_DISPLAY
(3158)其中:
图 18. EQUATION_DISPLAY
(3159)且
图 19. EQUATION_DISPLAY
(3160)对于迎头碰撞 (B = 0),临界韦伯数为
。对于大小相等的液滴的迎头碰撞
。该数值随着液滴尺寸差异的增加而增加。
擦边碰撞
擦边分离的阈值条件为 (对于 O'Rourke )或 (对于 Ashgriz)。假设液滴在擦边碰撞中保持其原始大小,液滴的新速度为:
图 20. EQUATION_DISPLAY
(3161)其中, 和 分别为较密集粒子束和较稀疏粒子束的质量。
擦边碰撞中将忽略卫星液滴的形成。每个液滴均会计算一次碰撞。较密集粒子束的速度将会更新,以考虑未参与碰撞的液滴:图 21. EQUATION_DISPLAY
(3162)其中, 和 分别为较密集粒子束和较稀疏粒子束中的颗粒数量。
反弹
反弹的阈值条件为 。
反弹颗粒的新速度由以下公式给出:
图 22. EQUATION_DISPLAY
(3163)与擦边碰撞一样,较密集粒子束的速度将会更新,以考虑未参与碰撞的液滴。
反射分离
反射分离的阈值条件为 。
反射分离后液滴的新速度为:
图 23. EQUATION_DISPLAY
(3164)图 24. EQUATION_DISPLAY
(3165) 是根据 curve () 的方程定义的:
图 25. EQUATION_DISPLAY
(3166)NTC 检测算法
NTC 模型使用两种算法来检测粒子束碰撞。默认情况下,它使用 NTC 检测算法,但当粒子束密度变高时,它会切换到 O'Rourke 检测算法。
对于稀疏喷射中的大量粒子束,NTC 算法更有效。NTC 仅考虑碰撞对的样本,但会放大碰撞概率,使每对更有可能被选中。平均而言,如果直接对完整分布建模,则结果相同。
如果网格单元包含 个液滴,则通过对所有可能碰撞的概率求和得出某时间间隔内网格单元中的预期碰撞次数:
图 26. EQUATION_DISPLAY
(3167)其中:
- 为两个碰撞粒子束之间的相对速度
-
为两个液滴的碰撞横截面,定义如下
图 27. EQUATION_DISPLAY
(3168)
- 为时间步长
- 为网格单元体积
- 为网格单元中的粒子束数
- 为粒子束 中的液滴数。
对称导致因子缩小一半。可以通过减去常数因子修改此总和:
图 28. EQUATION_DISPLAY
(3169) 的值可用于对碰撞的选择概率进行比例缩放。所选的值大到足以使以下限制成立
图 29. EQUATION_DISPLAY
(3170)假设可从网格单元内的一组粒子束中随机选择粒子束的一个代表子样。这种统计近似允许恒定乘数减小求和限值,如下所示:
图 30. EQUATION_DISPLAY
(3171)其中
图 31. EQUATION_DISPLAY
(3172)总成本与求和限值的乘积(即,)成比例。 的值与 成线性比例,因为 趋于 。可使用舍取方案计算二重求和。候选对数 () 从网格单元群体中随机选择。
选择一对之后,均匀分布中的随机数(从 0 到 1)将用于确定候选对是否实际发生碰撞。为每对选择一个新的随机数,即使对位于同一网格单元中也如此。如果偏差 满足不等式,则粒子束 和 之间会发生碰撞
图 32. EQUATION_DISPLAY
(3173)变量 表示 和 之间的液滴数较多。如果接受碰撞,则 (较少数量的液滴)实际参与碰撞。如果液滴聚结,液滴的一个粒子束会吸收另一个粒子束,在这种情况下,进行此区分非常重要。每当用于给定的网格单元时,NTC 算法与 成线性比例。
如果喷射如此密集,导致 ,则对此网格单元使用奥罗克方法直接计算碰撞比 NTC 算法更有效。然后,Simcenter STAR-CCM+ 会自动切换到奥罗克算法。
O’Rourke 检测算法
O’Rourke 碰撞检测算法是一种直接方法,因为它考虑所有可能的碰撞合作伙伴。以下是它与 NTC 检测模型(此模型将对碰撞对进行采样并根据结果放大碰撞概率)的对比。
任何液滴与所有其他液滴碰撞的概率由下式给出
图 33. EQUATION_DISPLAY
(3174)粒子束 中的液滴和粒子束 中的液滴之间的平均预期碰撞次数由下式给出
图 34. EQUATION_DISPLAY
(3175)碰撞次数可通过从泊松分布中采样确定,平均值为 :
图 35. EQUATION_DISPLAY
(3176)Eqn. (3176) 给出发生 次碰撞的概率。给出发生零次碰撞的概率。因此,每当用于给定的网格单元时,奥罗克方法与 成比例。