励磁线圈:场-路耦合
在电磁模拟中,可以使用励磁线圈电路元件将励磁线圈区域连接到电路。
电磁场解算方案与电路解算方案隐式耦合:可以使用电磁分析数据定义电路元件属性(例如,可以使用线圈区域的报告计算电路元件的电阻)。同样,可以使用电路数据定义区域电磁属性。
隐式耦合场-路模拟需要求解场的离散方程组和其他电路状态变量。
对于电机,与电池一样,控制系统可以包含开关频率非常高的设备。电机的电感可以使这些开关事件变平稳,从而可以从电路解耦场模拟。电路会对应用于电机端子的电压和电流做出响应。对于低频建模,场模拟只会响应闭环电流。但是,为进行电机模拟,载流元件被视为闭环。
除控制/电路侧的开关事件外,场模拟侧也会出现类似事件。对于转子和定子之间气隙非常小的电机,这些事件最为明显,例如开关式磁阻机就是如此。当由于转子位置变化而导致通量路径突然变化时,就会发生这些事件。
为合适的耦合提取参数时,需要为多个不同右侧求解线性化残差方程,以便直接稀疏矩阵求解器的总计算费用与迭代求解器可比。
电路侧
假设场模拟域中存在 个线圈。这些线圈中每个线圈的电流 (其中 )均形成一个电流矢量 。同样,每个线圈端子的压差 均可用一个矢量 来描述。在电路中,对感应电流和电机旋转的响应可通过以下方程来表示:
其中, 为直流电阻。 可以使用为励磁线圈模型所选的区域的特殊报告来计算。第一行是计算磁链 时间导数的直接方法,实际上是使用特定电动势的体积积分报告提供的。但是,对于某些机型,使用这种方法捕捉运动相关性在数值上可能不稳定。
提取方程第二行中的参数应该能解决这些问题。这些参数在微分电感矩阵 中。这通常是一个满秩矩阵,根据相应线圈对的邻近位置,有些输入项接近于 0。最后一项 是指运动感应电压。有关提取方法,请参见 [850] 的第 3 章。
由于电感矩阵是一个满秩矩阵,因此需要表示为多连接组件,而不是电流双极电路元件。
场侧
基于静磁近似(在其中所有载流区域都是绞合导线)的瞬态模拟在适当的边界条件下求解以下模型,如下所述:
其中:
- 为材料渗透率的倒数。
- 为电流密度分布,由导体的形状和电路状态决定。
Eqn. (4380),离散化时,会导致 与右侧 中表示的电流或其他源的非线性方程。
使用 Eqn. (4379) 中最后两个求和,可以求解上述方程的多个线性化方程组。
- 电感矩阵
- 电感矩阵
描述了系统磁链相对于电流更改的变化。对于其导数,转子位置被视为固定。
电路和场之间的基本数据交换在场侧通过有限元励磁线圈模型完成,在电路侧通过集总参数模型完成。
Eqn. (4381) 的右侧是矢量的线性组合,其中每个矢量表示一个单独的励磁线圈 。
Eqn. (4381) 的求解应用迭代过程使残余 降为零,方法是使用以下方程
(4382),因此 。
这还可用于度量 的偏差,作为对右侧 (作为由以下方程给定的一阶扩展)中微小信号变化的反应:
(4383)此外,可以通过求解 来计算右侧的更改一阶反应。
返回系统的磁链(这是给定励磁线圈求解中的线性映射)后,将设置右侧的方差以表示励磁线圈中作用电流的微小变化 :
(4384)请注意 。
因此,获取感应矩阵分量需要求解不同右侧的雅可比,然后将结果乘以线圈磁链 的加权矢量 。
对于电机,属于一个相的线圈可以收集在磁链报告中。这通常意味着求解三个相并获得 3x3 电感矩阵。
-
- 电动势
-
电动势的模拟需要获得线圈磁链因旋转而发生的变化。必须计算线圈电流的扭矩变化。扭矩 是以下场函数的简单圆柱表面积分:
(4385)是建议范围为 0.01 到 0.05 的小参数。因此线圈的解 经过两次后处理。
- 总结和潜在用户体验
-
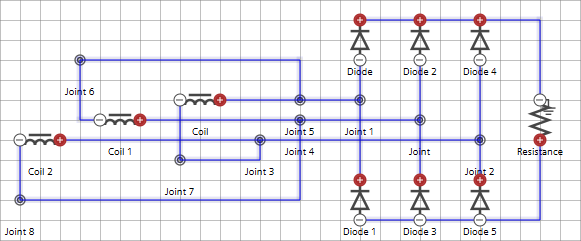
通过对附加右侧使用非线性解算方案的雅可比矩阵,在 Simcenter STAR-CCM+ 中计算感应矩阵。然后,可以指定线圈的连接以形成相,并因此减少感应矩阵电路元件中的极点对数量:
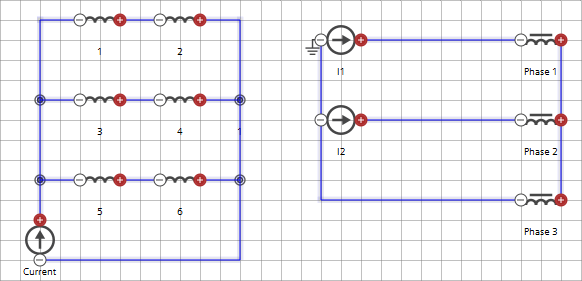
为此,可以先定义感应矩阵元件,然后执行添加一组相连线圈的操作。每一线圈组最终都定义了一个极点对。例如,对于上述电路,一个组连接线圈 1 和 2 形成相 ,以此类推。
对于运动情况,还需要一个元件:每个相脚的运动感应电压必须添加到每个接触对。