逆模方法
可以从拉伸的所需横截面开始,然后计算回到生成它所需的模的形状。
在直接拉伸问题中,模表面全部固定,但自由流表面必须移动,这样才能满足动力和运动边界条件。 尤其是,自由流上的运动边界条件可以写为:
其中, 为速度矢量场, 为边界上的单位法向。 上述方程仅需要沿穿过每个速度流线的直线的一个边界条件。 对于直接拉伸,将对模唇施加此条件。 或者,可以在拉伸截面的末端(出口)采用边界条件,因此在这种情况下必须修改拉伸入口(模唇)。 这可以通过使模变形来实现。
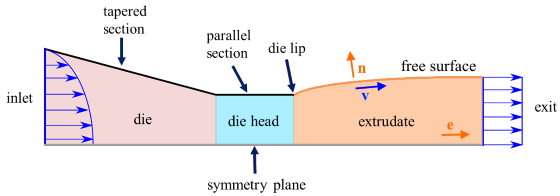
如上图所示,模修改通常由两个零部件组成:线性截面和短平行截面。 这两个截面都是拉伸方向 上线性修改的特殊情况。
基元微分几何的局部原理表示拉伸方向 的线性:
其中, 为位移矢量。 上述方程的变分形式乘以加权函数 ,然后在分部积分。 然后引入刚度系数 以给出:
其中, 表示由平方可积函数组成的 Sobolev 空间,其一阶导数也是平方可积,在具有重要(狄利克雷)边界条件的边界处的幅值为零。 但是,仅在法向(指向模边界)应用上述线性要求会得出:
锥化截面和平行截面之间的区别在于刚度 的区别(平行截面的值大于锥化截面的值)。
最后,注意,逆模设计只能在稳态条件下使用。