Solid Stress Model Reference
The Solid Stress model allows you to compute the displacement of solid structures under loads, using the finite element approach. This model is the prerequisite for all types of stress analysis.
| Theory | See 固体力学. | ||
| Provided By | |||
| Example Node Path | |||
| Requires | Physics Models:
|
||
| Compatible Meshers |
|
||
| Activates | Physics Models | Material Law Models. See Material Law Models Reference. | |
| Material Properties | For each solid material, Simcenter STAR-CCM+ activates mechanical and thermal properties based on the specified material law. See Material Law Models Reference. | ||
| Reference Values | Geometry Refinement Specification | ||
| Initial Conditions |
|
||
| Boundary Types | Wall, Symmetry Plane. See Boundary Types. | ||
| Region Inputs |
|
||
| Region Nodes | Segments. See Segments (Loads and Constraints) Reference. | ||
| Interface Inputs |
|
||
| Solvers |
|
||
| Monitors |
See Monitors. |
||
| Field Functions | Applied
Force, Body Force, Constraint Force,
Contact
Gap, Contact Pressure, Discrete Contact Gap,
Displacement, Element Type,
Internal
Force, Log Strain Tensor,
Rigid Body
Acceleration, Rigid Body Force,
Rigid Body
Velocity, Strain Tensor, Stress Max. Shear,
Stress
Mean, Stress Tensor, Stress Von Mises
See Field Functions. |
||
| Reports |
|
||
| Stopping Criteria |
|
||
Reference Values
- Geometry Refinement Specification
- When you constrain a surface, Simcenter STAR-CCM+ applies the constraint on the mesh vertices that lie on that surface (see Solid Stress Constraints). For accurate boundary conditions, it is important that the geometry of the surface is locally captured.
- On a feature edge, where two different surfaces meet,
Simcenter STAR-CCM+ must retain multiple normals per vertex.
Simcenter STAR-CCM+ recognizes a feature edge between two surfaces based on the specified
Dihedral Angle Tolerance. If the angle between the adjacent face normals exceeds the specified tolerance,
Simcenter STAR-CCM+ retains multiple normals. If the angle between the adjacent face normals is within the specified tolerance,
Simcenter STAR-CCM+ generates a unique vertex normal.

Initial Conditions
- Displacement
- Allows you to specify the initial displacement as a vector profile.
Stress analysis requires you to constrain the solid structure by prescribing the displacement vector at appropriate surfaces, curves, or points (see Applying Constraints). In dynamic analyses, the specified constraints take precedence over the initial conditions when conflicts occur. During the first iteration, the displacement solution transitions from the initial condition to the specified constraint. After the first iteration, the solid structure deforms under the specified loads and constraints. Specifying a nonzero initial displacement for the unconstrained degrees of freedom can lead to unbalanced residual forces and divergence of the solution.
- Velocity
- Allows you to specify the initial velocity as a vector profile.
Boundary Types
- Wall
- By default, wall boundaries are free from loads and constraints. Wall boundaries present a Stress/Displacement physics condition, which is always set to Free. This condition is read only, as you define loads and constraints on the associated part surfaces using segments. See Segments (Loads and Constraints) Reference.
- Symmetry Plane
- At symmetry plane boundaries, Simcenter STAR-CCM+ automatically sets the normal component of displacement to zero. As with wall boundaries, you can define loads and constraints on the associated part surfaces using segments (see Segments (Loads and Constraints) Reference.). However, do not define constraints that specify a nonzero normal displacement, as this would result in conflicting constraints.
Region Settings
Applies to solid regions.
- Body Load Derivative
- Only available when you set Body Load Option to Specified.
- Body Load Option
- Allows you to apply a body force on the region. Its counterpart in CFD is the Momentum Source Option. The Body Load Option is intended for body loads which are independent of the stress and strain, but may be a function of the displacement field.
- Geometry Refinement Option
- For a given region, allows you to overwrite the Dihedral Angle Tolerance specified in the physics continuum (see Geometry Refinement Specification).
- Mid-side Vertex Option
- Allows you to add or remove mid-side vertices. By default, Simcenter STAR-CCM+ mesh operations generate linear elements without mid-side vertices.
Region Controls
- Segments
- Activating the Solid Stress physics model automatically creates a Segments folder in the regions node. If you deactivate the Solid Stress model, and no segments are present, Simcenter STAR-CCM+ also removes the Segments folder. See Segments (Loads and Constraints) Reference.
Interface Settings
Interfaces can be conformal or non-conformal, but not imprinted. Imprinting may create polyhedral cells, which are not supported in finite element analysis. The available conditions are:
- Mechanical Interaction
- Available for solid/solid interfaces of type Mapped Contact Interface.
- 约束映射
- 可用于映射接触交界面类型的固体/固体交界面。
- 指定 Simcenter STAR-CCM+ 用于约束粘合表面的方法。可用选项如下:
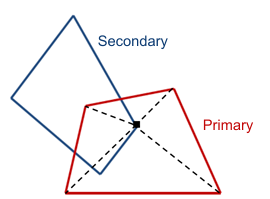
- 节点至表面: 默认选项。在两个有限元之间的交界面处,次单元上的节点被约束到主单元上重叠表面的节点。通常,此方法所需的计算工作量较少,但它不保留线动量和角动量(在固体应力计算中)或热通量(在固体能量计算中),并且可能导致计算的应力或温度局部不精确。
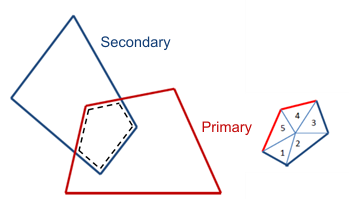
- 表面至表面: 在两个有限元之间的交界面处,次单元与主单元的重叠表面将细分在三角形中。在重叠表面上广义积分或弱积分以满足约束。与节点至表面方法相比,此方法保留线动量和角动量(在固体应力计算中)或热通量(在固体能量计算中),从而提高了计算的应力或温度的精度。但是,此方法需要更多的计算量,并且所需内存会随着使用的内核数而增加。
此选项仅适用于粘接映射接触交界面。滑动交界面自动使用节点至表面方法。
对于共享周长和节点的相邻交界面,建议使用相同的约束映射方法。使用这两种方法可能会导致过度约束共享节点。
- 节点至表面:
Monitors
- Displacement
- Solid displacement increment [m] (see Eqn. (4833)).
- Force
- Residual force [N] (see Eqn. (4833)).
- Strain Energy
- Strain energy, defined with the unit of [Nm] (see Eqn. (4838)). This monitor is available when you activate the Strain energy property for the Solid Stress Solver (see Solid Stress Solver Reference).
With these monitors they have corresponding stopping criteria that automatically becomes available when Solid Stress Solver is activated. See Stopping Criteria.
Field Functions
- Contact Gap
- Scalar field function that represents the contact gap between the solid surface and rigid obstacle. The contact gap is defined as the distance between a point on the solid surface and the closest-point projection on the rigid obstacle surface. For the contact gap calculation, Simcenter STAR-CCM+ considers a single closest point for all the surfaces of the rigid obstacle. For very large penetrations, this closest point may not correspond to the expected physical contact direction.
- Contact Pressure
- For Mortar discretization of a rigid contact, represents the Cauchy contact pressure ( in Eqn. (4482)) between the solid surface and the rigid obstacle. Positive pressure corresponds to a compressive load.
- Discrete Contact Gap
- For Mortar discretization of a rigid contact, represents the average contact gap from the projection of the continuous contact gap to the finite element nodes ( in Eqn. (4500)).
- Displacement
- Vector field function that represents the displacement in Eqn. (4426).
- Element Type
- Scalar field function that identifies each element topology with a unique number. To visualize the mesh element type, display this field function in a scalar scene. If all the elements in the mesh are of the same type, the color bar will display a single number. The values associated with each element topology are listed in the section, Element Type Reference.
- Log Strain Tensor
- For non linear stress-strain analysis, the tensor field function represents the spatial logarithmic strain tensor, as defined in Eqn. (4449)
- Rigid Body Acceleration
- Defines the acceleration, , in [eqnlink]. When you activate the Coriolis - Solid Displacement Velocity Effect model, the additional Coriolis acceleration term ([eqnlink]) is added to the rigid body acceleration.
- Rigid Body Velocity
- Defines the velocity of the body due to rotational and translational motions.
- Strain Tensor
- For linear stress-strain analysis, the tensor field function represents the infinitesimal strain tensor, as defined in Eqn. (4444). For non linear stress strain analysis, tensor field function represent the Green-Lagrange Strain tensor, as defined in Eqn. (4445)
- Stress Max. Shear
- Scalar field function that represents the maximum shear stress, as defined in Eqn. (4437).
- Stress Mean
- Scalar field function that represents the mean stress measure, as defined in Eqn. (4438).
- Stress Tensor
- Tensor field function that represents the Cauchy stress tensor (see Cauchy Stress).
- Stress Von Mises
- Scalar field function that represents the von Mises stress measure, as defined in Eqn. (4440).
- Forces
-
- Applied Force
- Vector field function that
represents the resultant of the applied surface and point loads.
At a node
, it is defined as:
(344)
- Body Force
- Vector field function that represents the resultant of the body forces. At a node , it is defined as:
- Constraint Force
- Vector field function that represents the reaction forces at constrained boundaries and at interfaces.
- Internal Force
- Vector field function that represents the internal elastic forces, as defined in Eqn. (4558).
- Rigid Body Force
- Defines the forces acting on the body due to the rigid body motions.
The internal force, applied force, and body force at a mesh node are calculated as the sum of all element contributions connected to , that is, the integrals Eqn. (344), Eqn. (345), and Eqn. (4558) are the sum over each element volume, surface, or edge associated with .
For more information on how to use these field functions in scenes and reports, see Reports and 求解分析准则.
Reports
The Sum Force and Sum Moment reports allow you to check for equilibrium of all the forces and moments acting on specified input parts, as required by conservation of linear and angular momentum. Each part and the sum of all input parts must be in equilibrium. The Sum Force and Sum Moment reports are defined with respect to a Cartesian coordinate system.
- Sum Force
- Reports the resultant of the applied, body, internal, or constraint forces on the specified input parts. The input parts for this type of report can either be geometry parts or regions.
- Sum Moment
- Reports the resultant moments of the applied, body, internal, and constraint forces, acting on the selected input parts, with respect to a specified location . Simcenter STAR-CCM+ first calculates the resultants of the moments per input part, by summing all the moments at the part nodes, and then sums the moment resultants calculated for each input part.
Stopping Criteria
The Solid Stress Solver has additional Stopping Criteria based on the convergence of the displacement, force, contact constraint, contact pressure, and strain energy residuals. For this solver, Simcenter STAR-CCM+ automatically adds the Displacement and Force stopping criteria. You can add the Strain energy Criterion manually by activating the Strain energy property of the Solid Stress Solver.
- Contact Pressure Criterion—monitors the difference between the current contact pressure and the Lagrangian multipliers (see Eqn. (4495))
- Contact Constraint Criterion—corresponds to the current normalized contact penetrations (see Eqn. (4496))
- Number of Uzawa Updates—Limits the number of times the Lagrangian multipliers are updated during the simulation.
For more information on the properties of the stopping criteria, see 基于监视器的属性.