变形
区域边界的位置和形状可以随时间变化,例如由于接触体的运动。 在 Simcenter STAR-CCM+ 中,变形算法根据边界位移重新分布网格节点,使网格可以进行非刚性变形。
变形算法将重新分布网格节点,它对网格单元体积、面或边不起作用。 变形无法计算网格质量度量,因此不会优化网格。
通过一组控制点定义变形施加在网格上的初始移动。 这些控制点源自变形边界上的网格节点或源自控制点表。 每个控制点与一个已知的位移矢量关联。 变形使用这些位移构建插值场,用于计算所有网格节点的位移。
变形使用控制点位移为区域生成一个插值场,用于定义变形运动。 然后,变形使用该插值场将网格节点平移到新位置。
插值算法
Simcenter STAR-CCM+ 提供了 BSpline 和径向基函数 (RBF) 这两种插值法。 BSpline 系数和并行化格式仅限局部,因此 BSpline 变形对并行计算而言比 RBF 更具可扩展性,可能会减少计算开销。- BSpline
-
根据 [18],Simcenter STAR-CCM+ 根据渐进自适应网格使用多级 BSpline 层级方法。
插值法为 C2 连续曲线,该方法生成的表面比 C0 或 C1 连续曲线更平滑。
考虑一个简单的 1D 示例。 下图显示了一条线段,“节点”处有 4 个 BSpline 系数(标记为 0-3),沿该线段等距间隔。 参数 是可能包含一个或多个控制点的间隔内的标准化距离:
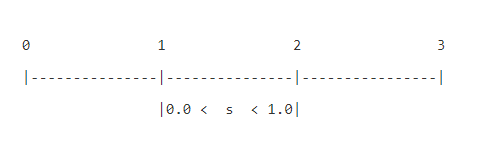
在此示例中,BSpline 曲线通过控制点(未显示)沿叠加到几何域的一条线拟合。 根据定义,这些点不与模型几何重合,而是围绕网格节点。 中心间隔 (1)-(2) 内的三次 BSpline 曲线至少需要 4 个系数:(4845)其中:- 为拟合曲线。
- 为沿间隔的标准化距离
- 为节点 处的 BSpline 系数值,且 =0、1、2 和 3。
权重函数 是均匀基函数,由以下公式给出:(4846)这些函数充当加权因子。 每个函数都对 具有适当的影响,使得 。
该方法可轻松扩展到 2D 和 3D 情况:(4847)其中,、 和 分别为 和 坐标方向上的基函数;这些函数描述了 1D 直线、2D 正方形或 3D 立方体上的节点(如适用)。
Simcenter STAR-CCM+ 中实现的 BSpline 方法采用层级过程,即:逐渐加密控制点网格,直到残差在变形容差指定的限制范围内。 按不同的网格尺度应用一系列校正。 为简单起见,将坐标命名为 ,其中 表示网格加密时间步, 表示目标坐标,残差即这些坐标之差, 。 残差实际上是位移,这在控制点处已知,但在其他位置则未知。
在达到所需的位移之前,残差可以表示为插值 与剩余残差 之和。
方程如下所示:
(4848)其中, 为该过程开始时点的坐标, 为时间步 处的插值, 为最后一个加密时间步,在该时间步将达到所需的位移。
执行加密,直到变形误差收敛到变形容差的精度范围内。 由于接近数据集越来越小,在特定加密等级,每个数据集仅包含一个控制点并实现精确插值,因而可保证此类算法的收敛。
层级方法效率低下,因为计算点数会随着加密呈指数增长,而许多计算针对的区域中没有数据。 更有效的方法是从计算中移除这些点。 根据 Eqn. (4848),仅当符合下列任一条件时,系数 才会等于零:
- 来自接近数据点的所有贡献为零,或
- 接近数据集为空。
在这两种情况下,可以假设这些点处的样条曲线校正已收敛,不需要进一步校正。 因此,在后续的加密等级,该算法仅收集非零系数,该过程名为自适应插值。 加密后,控制栅格中的点数会增加,但是相反,需要校正的点将减少。
下图显示了加密等级 0 处的控制栅格(左图)和级别 n 处的加密控制栅格(右图):
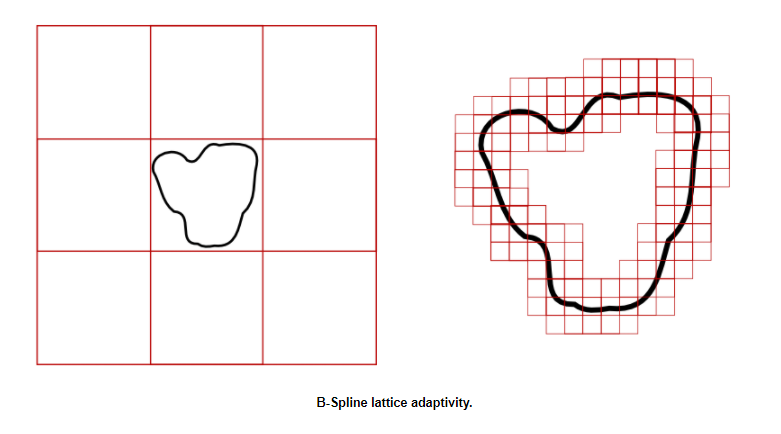
如果在边界表面(黑线)上定义了控制数据点,在特定加密等级后,不会校正内部区域节点。 操作数为 阶,其中 为控制点数(即,存在位移的节点), 为计算点数(即,几何中的所有节点), 为加密等级数。
- 径向基函数 (RBF)
-
RBF 变形通过一个方程组生成插值场;可使用控制点及其指定的位移创建这些方程,其中每个控制节点 的已知位移 展开为
(4849)其中, 是形状的径向基本函数
(4850)是两个节点之间的距离的幅值:
(4851)在这些方程中, 是展开系数, 是节点 的位置,N 是控制节点的数量, 是基本常数。 在 Simcenter STAR-CCM+ 中,基本常数设为零。 常数矢量 用于满足额外约束
(4852)此额外约束限制大 的展开。 如果对于所有 ,,则 Eqn. (4849) 中所述的系统非奇异。
方程 Eqn. (4849) 和 Eqn. (4852) 求解后,得出所有 的笛卡尔分量和常数矢量 的分量。 这会产生所需的插值场:
(4853)其中, 应用于网格中的所有节点,即
此方程现在可用于按计算出的位移 移动网格节点。
方程 Eqn. (4849) 和 Eqn. (4853) 中所涉及的矩阵是密集矩阵,简单矩阵运算需要 运算。 已开发出 方法,可在许多节点位置求解线性方程 Eqn. (4849) 和计算方程 Eqn. (4853)。 RBF 变形使用具有特殊预调节器([15]、[16])的共轭梯度法以及快速多极法 [17] 加速矩阵矢量乘法的计算。
边界平面条件(RBF 变形)
Simcenter STAR-CCM+ 为变形边界上的节点提供两个约束:边界平面和固定边界平面约束。 对于固定边界平面条件,位于指定平面上的节点固定;而对于边界平面条件,允许这些节点在平面自身内移动。 通过使用控制节点,可以实现类似于固定边界平面条件的作用,但固定边界平面条件本身效率更高。 约束平面附近节点的移动因此与平面上节点的移动顺利结合起来。
可以使用如下所述的阻尼距离 控制约束平面附近的这一移动,但这仅适用于 RBF 变形。
在求解 Eqn. (4849) 之前施加这些约束。 在准备时,通过求解以下方程,用户指定的位移 转换为
其中, 是第 p 个平面的法线, 是平面的数量。 在变形过程结束时,位移 与其他网格节点一起转换回 。 和 是与选定平面类型和连续性条件相关的函数。 这些函数如下所示:
| 连续 | 连续 | |||
|---|---|---|---|---|
| 固定边界平面 | ||||
| 边界平面 | 1 | 1 | ||
此处:
其中
是第 p 个平面到 的有符号距离与阻尼距离 之比。 是第 p 个平面上的位置矢量, 输入为有限距离,或自动计算为 。 和 分别是平面到位于平面活动侧的最近和最远控制节点的距离。
下面绘制了函数 和 在范围 0 到 1 内的变化以进行比较。 连续性等级 产生平滑过渡。
时间步中 RBF 变形阶段所包含的步骤如下:
- 控制节点位移 根据 Eqn. (4854) 转换为 。
- Eqn. (4849) 通过 Eqn. (4852) 求解,以提供插值场。
- 利用 Eqn. (4854),位移矢量从 转换为 。
线性拟合
线性拟合可与 BSpline 和 RBF 变形一起使用。
每个位移分量 表示为坐标的函数。 使用最小二乘法,得出每个位移分量的超平面方程。
考虑 x 位移 的拟合问题:
可以构造超定线性方程组
矩阵形式为
其中, 为带点坐标的矩阵, 包含超平面系数, 为位移列。
要使用最小二乘法解决此问题,需构造正规方程:
,其中 为伪逆矩阵。
RBF 变形使用 Cholesky 分解来求解线性方程。 对于 BSpline 线性拟合实现,使用奇异值分解 (SVD) 方法分解该矩阵。