参考坐标系
网格运动相对于参考坐标系定义,该坐标系可以相对于基准坐标系固定(基准参考系)或旋转和平移。 在稳态模拟或不需要时间精确求解的瞬态模拟中,移动参考坐标系提供了一种方法可将旋转和平移建模为稳态问题,而不移动网格。
考虑以恒定速度旋转和平移的移动参考坐标系:
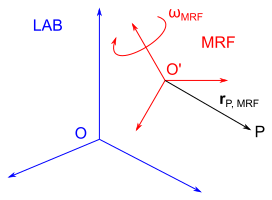
材料点 P 相对于移动参考坐标系的速度(也称为相对速度)可以写为:
(4860)
其中, 为基准参考系中的速度(也称为绝对速度), 为移动参考坐标系的平移速度(即,其原点相对于基准参考系的速度), 为移动操控坐标系相对于基准参考系的角速度, 为材料点相对于移动参考坐标系的位置矢量。
可以定义移动参考坐标系相对于父参考坐标系(可以同时执行旋转和平移)的旋转。
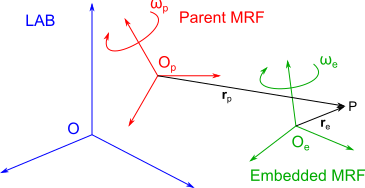
产生的相对速度是:
(4861)
且
其中, 为父参考坐标系的角速度(如基准参考系中所测得), 为嵌入式参考坐标系的角速度(如父参考坐标系中所测得), 为相对于父参考坐标系的位置矢量, 为相对于嵌入式参考坐标系的位置矢量。