设置停止条件
根据连续体和动量监视器创建停止条件,以确保求解不会在单个时间步内不必要地迭代。
-
右键单击节点,然后选择。
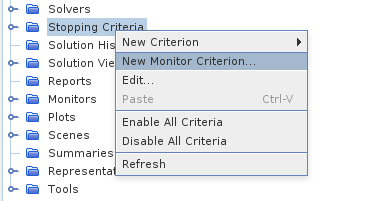
- 在选择监视器对话框中,选择监视器并单击确定。
- 重复此步骤,以便为 、和 创建条件。
-
选择节点,然后通过按住 Ctrl 键的同时单击为 、和 选择。
- 将最小值设置为 0.001。
-
选择节点,然后通过按住 Ctrl 键的同时单击选择 、和 节点。
- 在属性窗口中,将逻辑规则更改为 。
将逻辑规则设置为 意味着,所有四个监视器(、、和 )的值必须降到 0.001,此模拟才会假定已实现充分的收敛并继续前进到下一个时间步。 可能会出现在达到此收敛级别之前激活一个其他停止条件的情况,在这种情况下,模拟将前进到下一个时间步。
- 选择节点,然后将最大内部迭代设置为 10。
- 选择节点,并确保将最大物理时间属性设置为 1.0 s。