盘体分辨率
用户自定义法以叶片单元法的插值法为基础,并将其扩展为三个维度。圆柱虚拟盘体与基础体网格的网格单元关联。指定的盘体分辨率可控制此关联。此圆柱三维虚拟盘体网格的每个单元或容器均与基础体网格上的网格单元数关联。容器是圆柱扇区,其径向位置、角度范围和厚度均由用户指定的盘体分辨率控制。
下图显示了 (4,4,3) 分辨率的虚拟盘体网格点:
根据用户指定的分辨率 (nx, ntheta, nz),可通过 n = nx * ntheta * nz 得出容器总数。其中,nx 是径向上的网格单元数,ntheta 是方位角方向上的网格单元数,nz 是盘体法向上的网格单元数。容器按如下所示一维顺序排列:bucket(0), bucket(1), bucket(2),..., bucket(n-1)。圆柱盘体网格上的点与容器 ID 之间的映射取决于以下循环顺序:
for (k=0:nz)
for (i=0:nr)
for (j=0:ntheta)
bucketID = j + i * ntheta + k * ntheta * nr 其中,
k 是 Z 方向上的盘体网格点索引,i 是径向上的盘体网格点索引,j 是方位角方向上的盘体网格点索引。因此,容器 ID 先后在径向、方位角方向、最后在盘体法向运行。以下屏幕截图显示了此映射过程的示例:对于此示例,盘体分辨率为 (3, 4, 2),容器总数为 n = 3 * 4 * 2 = 24。
下图显示了容器,容器 ID = 4 对应于
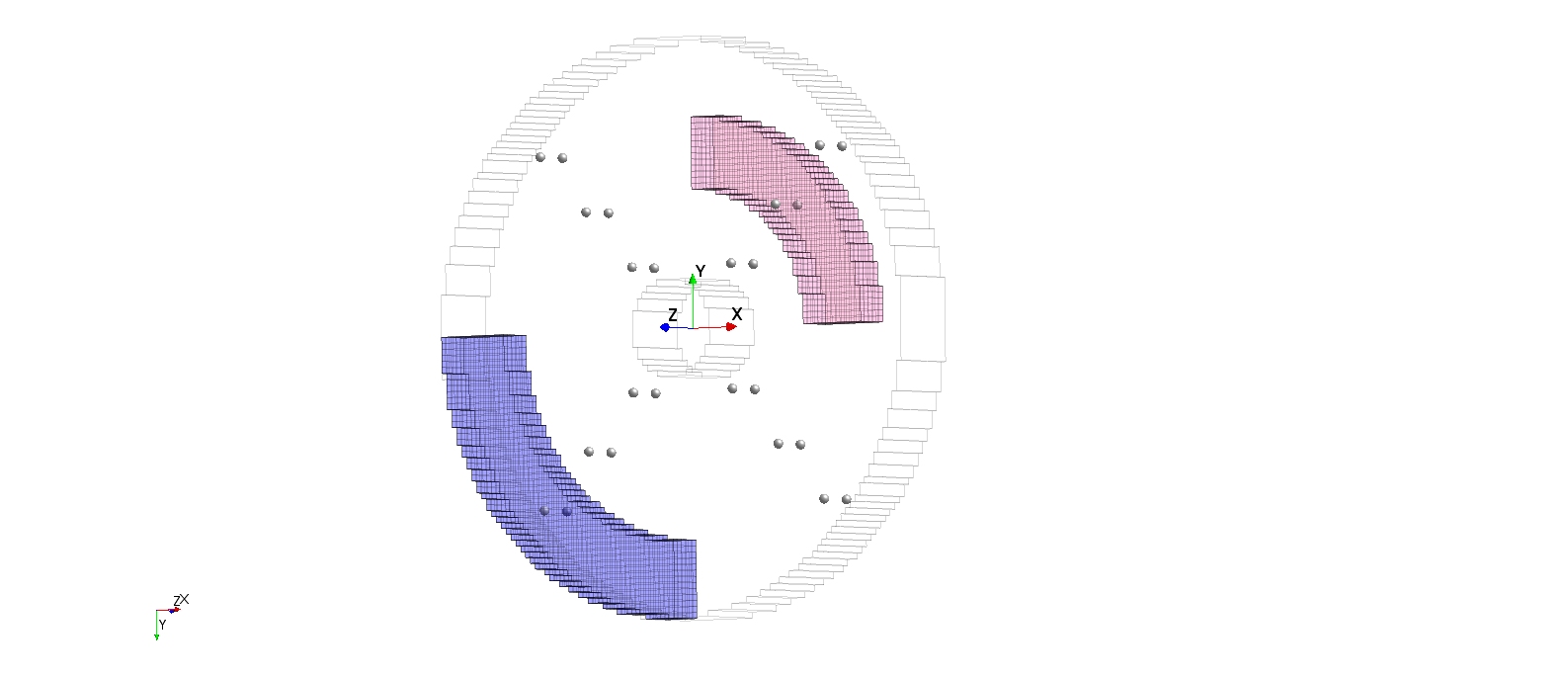
(i = 1, j = 0, k = 0),容器 ID = 22 对应于 (i = 2, j = 2, k = 1)。在上图中,可以看到标记为点的容器,以及体积源项影响的体网格的相应网格单元。由于盘体网格是圆柱,因此与内半径的容器(红色网格单元)相比,外半径的容器(蓝色网格单元)会影响体网格的更多网格单元。