变形边界条件参考
- 变形指定
- 控制如何执行边界变形。当选择变形运动时激活。
-
指定 对应的变形物理值节点 - 固定
-
边界节点在空间中固定。
固定变形边界方法提供用于计算插值场的控制点。但是,在这种情况下,与控制点关联的位移为零。
- 变形薄化因子(仅限 RBF)
-
减少控制点的数量以降低计算成本。节点薄化因子指定用作控制点的边界节点的分数。为未选择的节点提供了应用的边界条件,以确保边界运动正确。
对于接近影响区域的非平面边界,保持节点薄化因子接近 1.0,以避免固定边界变形。
对于距离影响区域足够远的平面边界,减少节点薄化因子(如示例中所示,值 0.1 用于烟囱截面)。
- 刚性棱柱层变形
- 刚性棱柱层方法保留与边界相邻的棱柱层的原始未变形形状。
但是,如果某个边界与邻近的另一个边界之间的距离变得太小,则棱柱层网格单元会变形。使用与其他边界的最小间隙设置此阈值距离。
对于固定边界,当此选项处于活动状态时,棱柱层中的节点将保持固定。来自变形的变形分布在剩余的网格单元节点中。
- 位移
-
边界节点将移动指定的距离。有几种位移类型可用。添加变形位移指定节点,从中可以选择更多选项来移动边界节点。
注 对于固体和流体区域相接触且在流体或固体区域中指定了变形运动的模拟案例,变形指定在接触交界面边界上将自动设为位移。
取决于在变形位移指定节点下选择的选项。 - 刚性棱柱层变形
- 刚性棱柱层方法保留与边界相邻的棱柱层的原始未变形形状。
但是,如果某个边界与邻近的另一个边界之间的距离变得太小,则棱柱层网格单元会变形。使用与其他边界的最小间隙设置此阈值距离。
对于位移边界,当此选项处于活动状态时,棱柱层中的节点仅跟随边界运动,但不会变形。
注 如果为位移边界启用了刚性棱柱层变形选项,则变形首先检查边界的刚度,即边界的位移是否仅由于应用了平移和旋转。对于非刚性边界(例如,由固体应力变形所致),变形求解器将忽略处于活动状态的刚性棱柱层变形选项。
- 浮动
-
边界上的节点根据位移矢量场的插值移动。
使用浮动方法时,边界上的网格节点根据变形创建的插值场移动。使用此变形边界类型的示例是进行一维膨胀或收缩的活塞侧壁,如下图所示。
无。 - 约束
- 边界节点只能处于一个平面或三角表面的范围内。添加变形平面约束条件指定节点,从中可以选择是否激活 Use Triangulation Plane(使用三角平面) 选项。
取决于在变形约束条件指定节点下选择的选项。 注 约束将用于所有对称边界。
- 变形位移指定
- 控制使用哪种类型的位移对边界节点进行变形。
-
指定 对应的变形物理值节点 - 总计
-
相对于边界节点初始位置而言,边界节点的每个时间步的线性总位移。每个时间步处的目标坐标为:
- 变形刚性边界运动
-
用于将此边界的增量线性位移变形运动与刚体运动合并。所有类型的刚体运动均兼容。选择下定义的刚体运动。
- 变形薄化因子(仅限 RBF)
-
减少用作控制点的节点数量以降低计算成本。指定节点薄化因子以仅将此部分的边界节点用作控制节点。为未选择的节点提供了应用的边界条件(以使边界运动正确)。
- 总位移参考
- 指定边界节点的参考初始位置。
- 初始坐标 - 相对于第一个网格配置的初始坐标(存储在
initial_coordinate场函数中)。 - 保存的坐标 - 相对于上一网格重构配置的初始坐标(存储在
saved_coordinate场函数中)。
无需网格重构,这些选项是等效的,并提供相同的坐标。
- 初始坐标 - 相对于第一个网格配置的初始坐标(存储在
- 增量
-
边界节点相对于上一个时间步或迭代的节点位置的线性位移。边界目标节点坐标计算如下:
- 变形增量线性位移
- 指定为相对于坐标系的矢量分布。
- 变形刚性边界运动
-
用于将此边界的增量线性位移变形运动与刚体运动合并。所有类型的刚体运动均兼容。选择下定义的刚体运动。
- 变形薄化因子(仅限 RBF)
-
请参见总位移指定下的内容
- 网格速度
-
此边界上的节点按照指定的速度移动。生成的位移与用于模拟的时间步成比例。边界目标节点坐标计算如下:
目标坐标 = 当前坐标 + 网格速度 * 时间步。仅当使用“时间”的适当非稳态模型在 [物理连续体] 节点下将求解设为“非稳态”时,使用网格速度设置“位移”的选项才可用。
- 网格速度
-
输入为矢量分布。如果使用用户自定义的分布来设置此值,分布的类型必须为区域,不能为边界。但是,在本例中,仅使用边界节点。
- 变形薄化因子(仅限 RBF)
-
请参见总位移指定下的内容
- 内部
-
位移场由其他 Simcenter STAR-CCM+ 模型在内部计算,被视为增量位移。此方法供液膜凝固模型(例如用于机翼除冰模拟)和粘性流模型(例如用于拉伸模拟)用来对自由表面跟踪进行建模或逆模设计模拟。添加自适应模选项节点。
无。 - 坐标偏移
-
指定相对于任何坐标系(例如圆柱坐标系)的增量位移。有关更多信息,请参见什么是坐标偏移。
- 坐标偏移
- 将坐标偏移值指定为相对于坐标系的矢量分布。
- 变形薄化因子(仅限 RBF)
-
请参见总约束指定
- 固体应力
-
此变形位移指定仅适用于已选定固体应力模型的模拟,并仅适用于固体与流体区域之间的接触交界面。固体应力模型将计算矢量位移场,该场从面映射到节点并作为增量位移应用。
- 位移
- 指定位移方法,以应用固体应力求解器计算的固体位移。唯一选项为映射位移。
- 变形薄化因子(仅限 RBF)
-
请参见总位移指定下的内容
- 与表面正切
-
此表面上的节点沿表面切线方向移动。生成的位移与用于模拟的时间步成比例。为了确保精度,表面必须平整或接近平整。边界目标节点坐标计算如下:
目标坐标 = 当前坐标 + 增量位移。稍后,系统将对从
当前坐标指向目标坐标的矢量进行校正,使距离当前坐标至表面和目标坐标至表面相等。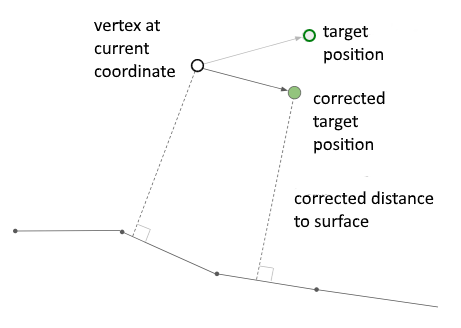
- 变形增量线性位移
- 指定为相对于坐标系的矢量分布。位移必须与选定表面相切。
- 变形刚性边界运动
-
用于将此边界的增量线性位移变形运动与刚体运动合并。如果所有类型的刚体运动与选定表面保持相切,则它们相兼容。选择下定义的刚体运动。
- 变形薄化因子(仅限 RBF)
-
请参见总约束指定
- 部件表面
- 选择几何部件的表面以用作约束。几何部件可源自以下源:
- 变形约束条件指定
- 指定当变形指定节点设为约束时应用于边界的约束类型。下表列出了约束和对应的物理值节点。除了案例(部件表面)之外,BSpline 变形没有相关的物理值节点。
-
约束 对应的物理值节点 - 边界平面
-
边界节点只能在边界平面内移动,边界平面是一个无限平面,其方程是使用最小二乘拟合法定义的。
此行为适用于类似如下所示的模拟:
- RBF 变形
- 变形平面选项
- 确定此平面附近点的变形行为。
从指定为阻尼因子的距离处开始,边界上的位移平滑衰减至零。阻尼因子对应于 Eqn. (4857) 中的 。默认值 0.0 表示自动计算距离。
连续性等级指定要在平滑逼近平面的节点位移中使用的阻尼函数。有关更多信息,请参见边界平面条件(RBF 变形)。
忽略因子乘以阻尼因子可计算有限距离。对于与此平面的距离短于指定距离的控制点,予以特殊处理。允许值为零。
- BSpline 变形
- 无。
- 固定边界平面
-
固定边界平面上的网格节点不根据变形插值场移动。此边界不同于固定边界,因为没有控制点取自应用此方法的边界。最终,这意味着可以采取计算效率更高的方法。但是注意,应用此边界条件会创建可能与模型几何的其他部件相交的无限平面。
下图中的烟囱出口截面是适合应用固定平面方法的边界:
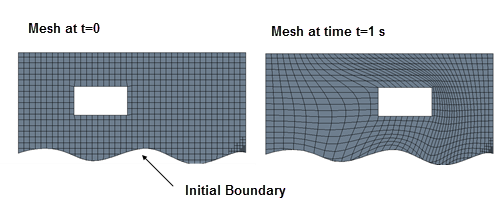
与边界平面约束相同 - 初始边界
- 边界节点在零时沿原始边界节点滑动。这些边界作为导向面,可以具有任何合理的形状(如下所示)。
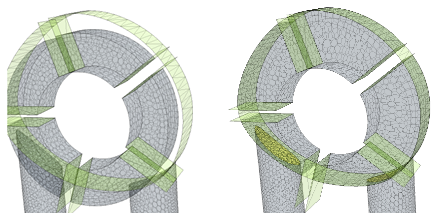
无。 - 部件表面
- 边界节点沿用作导向面(可以具有任何合理的位置和形状)的部件表面滑动。部件表面可以作为模型的特征已经存在,或者可以为提供导向面而生成部件表面。部件无需与原始区域几何重合(如下图所示),其中网格在初始化后投影到部件表面上(绿色)。
为确保边缘变形一致,应确保约束表面相交。使用边界平面和部件表面时,确保计算的无限平面与部件表面相交。例如,可以沿边界平面的法向延伸部件表面以保证此相交。
- 自适应模选项
- 适用于非牛顿逆模模拟。根据指定拉伸的几何和移动来调整模的形状。将变形指定设为位移时,将激活此选项。可用选项如下:
- 锥形
用于使模壁面根据拉伸流体进行锥化。
- 平行
指定具有较高刚度因子的短截面,在使用 Tapered(锥化) 条件的模出口和使用自由表面条件的拉伸之间进行转换。
- 固定
保持壁面几何固定。这是默认设置。
- 锥形