螺旋桨旋向
螺旋桨可以是右旋或左旋。螺旋桨的形状决定了为使安装该螺旋桨的船舶行进所必须旋转的方向。
在 STAR-CCM+ 中,将相对于船舶社区常用的传统定义来修改螺旋桨旋向的定义。
船舶行业中的螺旋桨旋向
旋向定义需要一个参考方向。通常,船舶社区相对于船舶的船尾定义螺旋桨旋向:
- 从船舶的船尾看时,右旋螺旋桨顺时针旋转以产生向前的推力。
- 从船舶的船尾看时,左旋螺旋桨逆时针旋转以产生向前的推力。
螺旋桨的旋向会影响其形状。从船尾看螺旋桨时,前缘比后缘距离观察者更远。例如,从船尾看时,右旋螺旋桨的前缘位于右侧,螺旋桨顺时针旋转。
STAR-CCM+ 中的螺旋桨旋向
螺旋桨旋向可作为体积力螺旋桨法中的一个选项。
通常,螺旋桨的设计已针对向前运动进行了优化。但是在实践中,螺旋桨还可用于船舶的反向运动。鉴于此事实,STAR-CCM+ 不会与传统定义一样,使用船舶的船尾作为左旋/右旋定义的参考方向(请参见船舶行业中的螺旋桨旋向)。
在 STAR-CCM+ 中,使用虚拟盘体的局部坐标系作为定义螺旋桨旋向的参考:
- 从该虚拟盘体局部坐标系的 z 轴正向观察时,右旋螺旋桨逆时针旋转。
- 从该虚拟盘体局部坐标系的 z 轴正向观察时,左旋螺旋桨顺时针旋转。
使用虚拟盘体的局部坐标系不会更改旋向定义,只更改旋转方向的基准轴线。虚拟盘体的局部坐标系会根据船舶的推进方向改变,因而此方法始终适用。推进方向将根据虚拟盘体的方向指定来指定。
旋转方向
“螺旋桨旋向选项”可结合虚拟盘体的工作点输入选项和方向指定,规定或更改螺旋桨的旋转方向(顺时针或逆时针)。
要指定工作点,可使用三个选项:
- 旋转速率 ( )。
- 推力 ( )。
- 扭矩 ( )。
推进方向根据虚拟盘体的方向指定来指定。向前和反向推进方向根据选定坐标系及其相对于船舶的船头和船尾的方向定义。
在下表中,假设盘体法向与坐标系选项用作方向指定。螺旋桨旋向与虚拟盘体局部坐标系方向的组合及其对推进方向和螺旋桨旋向的影响汇总如下:
| 旋向 | 法向 | 推进方向 | 旋转方向 |
|---|---|---|---|
| 右 | (1,0,0) | 向前 | CCW |
| 右 | (-1,0,0) | 向后 | CCW |
| 左 | (1,0,0) | 向前 | CW |
| 左 | (-1,0,0) | 向后 | CW |
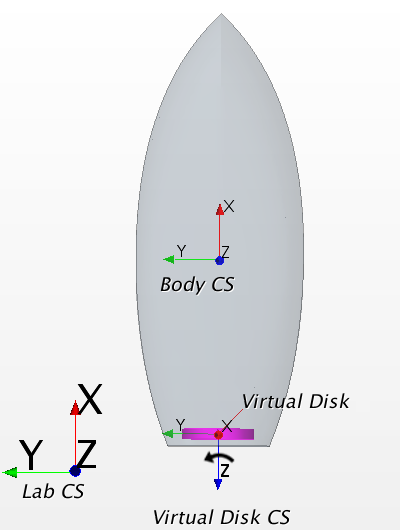
在下图中,虚拟盘体的方向根据体坐标系指定。虚拟盘体的局部坐标系方向自动调整为相对于体坐标系指定的法向。下图显示了每种旋向类型对应的螺旋桨旋转方向:
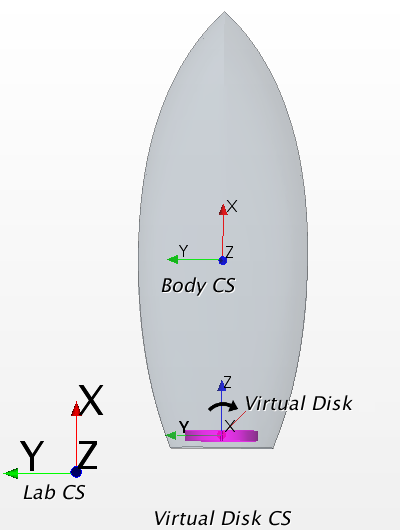 |
 |
| 向前配置中的右旋螺旋桨 | 向后配置中的右旋螺旋桨 |
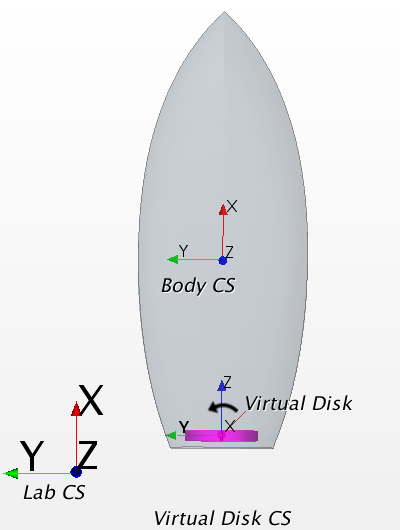 |
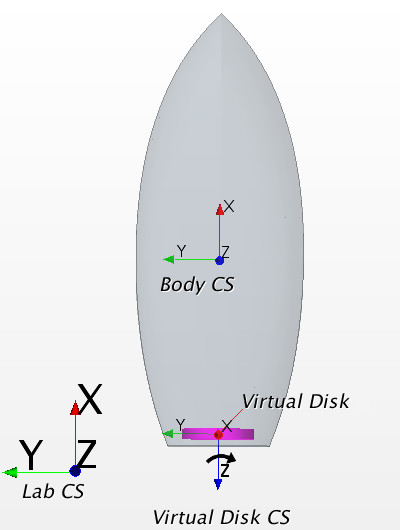 |
| 向前配置中的左旋螺旋桨 | 向后配置中的左旋螺旋桨 |