拉伸和自由表面流
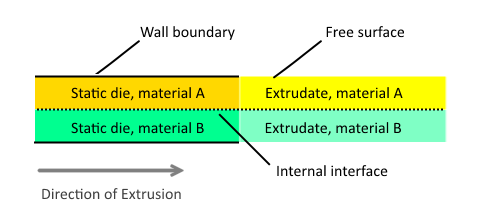
可以使用自由表面模型来模拟聚合物熔体的拉伸过程,以及涉及广义牛顿和粘弹性流体的自由表面流的其他过程。自由流边界表示拉伸部分的外表面,内部交界面则表示接触的拉伸部分之间的边界。由于其形状在模拟开始时未知,因此自由表面将作为求解的一部分进行计算。通常,应将这些模拟设置为稳态模拟。也可以使用时间相关的模拟。在这种情况下,自由表面位置将以材料速度传播。
STAR-CCM+ 使用任意拉格朗日-欧拉 (ALE) 方法 [187] 计算聚合物的自由表面。ALE 方法通过根据自由表面形状和位置变形的网格边界来对自由表面建模。此网格运动将通过网格变形执行。必须为网格运动提供适当的边界条件和约束。网格运动将以稳态执行。当求解收敛时,它将达到平衡形状和位置。
当相之间的交界面大致位置已知时,自由表面模型是首选方法,因此可以指定多个区域之间的初始交界面位置,并使用 ALE 计算最终位置。在模唇之后材料相互接触的情况下,自由表面模型也很有用。
通过为每次拉伸部分使用至少两个部件,可以准备多部件网格。一个部件表示静态模或固定几何,另一个部件表示拉伸部分或自由表面。如果使用默认的线运动条件,则自由表面的体网格必须为朝向拉伸方向的定向网格。可以为处于初始无形变状态的自由表面生成网格。对于线运动条件,初始自由表面网格必须与拉伸方向对齐。
运动条件
运动条件设置将对具有自由表面边界的区域中的网格单元施加约束,以限制网格单元可在自由表面边界的面上移动和更改形状的方式。线运动条件仅适用于定向网格化的情况,而表面运动条件则可使用所有网格类型,但不太适用于拉伸区域中的角。
线运动条件要求边界的每条边最初与拉伸方向对齐:平行或与其正交。此要求不适用于法向方向模具或反拉伸模具。因此,作为自由表面一部分的网格单元表面将始终与流速相切。
表面运动条件的限制较少。它要求自由流网格单元面与流速相切,但不要求网格单元边与速度平行。因此,只要自由流表面始终与速度相切,网格单元即可相对速度进行旋转。
