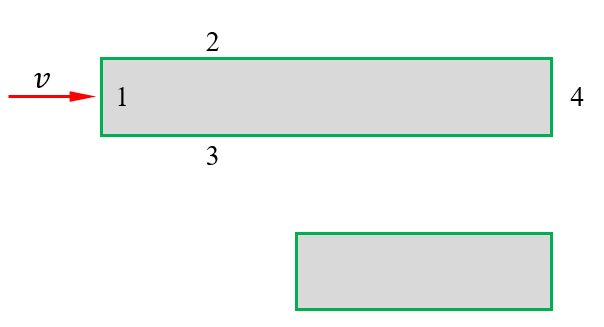
在动网格中关于部件运动除了指定刚体运动外,有时还需要指定某些边界的变形,这种情况经常会遇到,尤其是与运动部件存在相连接边界的情况下,如下图中边界1运动导致与之相连的边界2和边界3发生变形。本文讲解在Fluent中如何处理部件的变形。
Fluent中预制了三种变形方式:
-
faceted
-
plane
-
cylinder
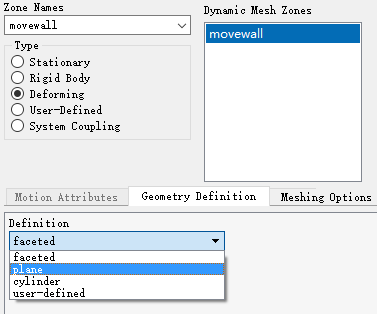
除此以外,Fluent还允许用户通过UDF宏DEFINE_GEOM自定义边界变形。
faceted
选择此类型的变形,则意味着对边界的变形不加控制,变形边界的形状取决于刚体运动。
此方式不需要定义变形参数。
plane
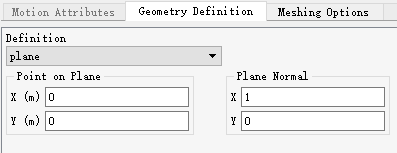
定义几何变形方式为plane意味着该几何上的所有的节点,只能在此平面内运动。
平面的定义采用点和法线方式定义。如图所示。
cylinder
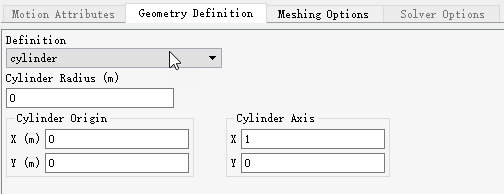
采用cylinder方式,则意味着该几何上的所有节点在变形过程中,只能在所定义的圆柱面上运动。
定义 圆柱面采用的参数包括:圆柱半径、轴上的一个点的坐标以及轴的方向矢量。其中轴的方向矢量(图中的cylinder axis)同时还定义了圆柱的高。
user-defined
用户自定义方式则是采用UDF宏DEFINE_GEOM进行定义。
此宏的结构很简单,定义形式为:
DEFINE_GEOM(name ,d , dt, position)
其中:
name:为UDF名称,用户自己取名字。
d:一个指向区域的指针,由Fluent传入。类型为Domain *d
dt:一个存储动网格属性的结构体指针,由Fluent传入。类型为Dynamic_Thread *dt
position:存储网格节点位置的数组指针。类型为real *position。
在此宏中,除了name是用户指定的之外,其他参数均为Fluent传入,用户通过更改position指针数据来将新的网格节点位置返回至fluent。
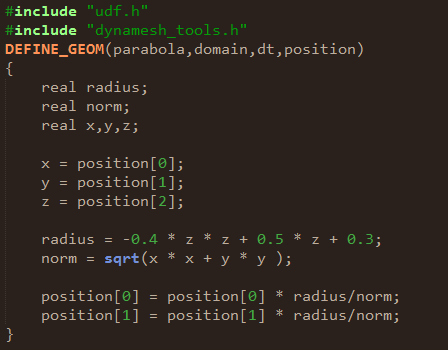
DEFINE_GEOM实例
下列UDF定义了一个绕Z轴旋转的抛物面变形体。
动网格效果及操作视频在下期放出。(审核了一个小时还没审完,搞什么名堂)
本篇文章来源于微信公众号: CFD之道




评论前必须登录!
注册