
点击文尾阅读原文回放

导读:在航空科技的浩瀚星空中,倾转旋翼机以其独特的飞行模式和卓越的性能,成为了连接直升机与固定翼飞机的桥梁。其独特的倾转旋翼设计,使得这类飞行器既能在垂直起降时如直升机般灵活,又能在高速巡航时如固定翼飞机般高效。然而,倾转旋翼机的复杂性与创新性也对仿真技术提出了前所未有的挑战。倾转旋翼无人机仿真中的三大关键技术:重叠网格法、网格变形法以及六自由度法,带您走进这一高科技领域的核心。
一、重叠网格法:构建动态飞行的数字骨架
重叠网格法,作为倾转旋翼机仿真中的一项关键技术,其核心在于通过多个网格区域的相互重叠与动态调整,来模拟旋翼在不同倾转角度下的复杂流场。这一方法有效解决了传统单一网格难以准确捕捉旋翼动态变化的问题。
1、重叠网格法原理阐述
重叠网格法,又称嵌套网格网格,是一种处理复杂外形网格布局的有效方法。其基本原理在于将计算域划分为多个子区域,每个子区域拥有独立的网格系统,这些子网格区域可以相互重叠或嵌套。这种网格结构的设计旨在简化网格生成任务,同时保持对流场算法和计算机代码复杂性的低影响。
在重叠网格法中,各个子网格是独立生成的,这意味着它们的生成过程不会受到其他子网格的限制。这种独立性使得重叠网格法在处理具有复杂外形的飞行器或设备时具有显著的优势。例如,在倾转旋翼机的仿真中,由于旋翼的倾转和旋转运动,传统的固定网格方法可能无法有效地捕捉流场的变化。而重叠网格法则可以通过动态调整重叠区域的网格来适应这种变化,从而更准确地模拟倾转旋翼机的飞行性能。
2、重叠网格法的优势与应用
重叠网格法在处理复杂外形和流动特性的飞行器或设备时具有显著的优势:
-
重叠网格法允许各个子网格独立生成,从而简化了网格生成任务。 -
这种独立性使得重叠网格法能够更灵活地适应复杂几何形状和流动特性。
-
通过在重叠区域进行插值数据交换,重叠网格法能够保持流场信息的连续性和准确性。
-
同时,由于各个子网格可以独立计算,重叠网格法能够并行处理多个子区域,从而提高计算效率。
-
重叠网格法特别适用于处理具有相对运动的复杂结构问题。
-
例如,在倾转旋翼机的仿真中,重叠网格法能够准确地模拟旋翼的倾转和旋转运动对流场的影响。
-
重叠网格法在航空航天领域的飞行器设计、汽车工程中的外流场仿真、风能发电中的风力机仿真以及生物医学工程中的血流动力学仿真等方面都展现出了广泛的应用前景。
3、仿真流程
-
网格划分:根据倾转旋翼机的几何特征和飞行状态,将计算域划分为多个子区域,并设计重叠区域。
-
初始条件设置:设定飞行环境参数(如风速、温度等)和飞行器初始状态(如位置、速度、姿态等)。
-
求解器配置:选择合适的流体动力学求解器,并配置相关参数,如湍流模型、时间步长等。
-
动态调整:随着旋翼倾转,通过算法动态调整重叠区域的网格,确保流场信息的连续传递。
-
结果分析:收集并分析仿真数据,评估飞行性能,如升力、阻力、稳定性等。
二、网格变形法:精准模拟桨叶角的变化
倾转旋翼机在倾转过程中,桨叶角的变化对飞行性能有着至关重要的影响。网格变形法正是通过调整网格形状,来精确模拟这一动态过程。
1、网格变形法的基本原理
网格变形法是一种通过对网格进行变形操作,以改变模型的几何信息,同时保持模型的拓扑连接关系的方法。在数字几何处理中,网格通常是由一系列顶点、边和面组成的离散表示,用于描述三维物体的形状和表面。网格变形法则是在这种离散表示的基础上,通过调整顶点的位置或改变网格的拓扑结构,实现对物体形状的改变。
网格变形法的核心在于其变形算法,这些算法通常基于不同的数学原理和物理模型,如弹性力学、刚体运动学等。通过应用这些算法,可以在保持模型整体结构和局部细节的前提下,实现对物体形状的精确控制和逼真模拟。
2、网格变形法的技术分类
网格变形法根据其变形方式和应用场景的不同,可以分为多种类型。以下是一些常见的网格变形法技术分类:
(1)基于物理的网格变形法
-
这种方法通常基于弹性力学或塑性力学等物理原理,通过模拟物体的物理行为来实现网格变形。例如,可以利用弹簧-质点模型或弹性体模型来模拟物体的变形过程,并通过求解相应的物理方程来得到变形后的网格。 -
基于物理的网格变形法具有逼真的变形效果和较高的计算精度,但计算复杂度较高,且对模型的物理属性(如弹性模量、泊松比等)有一定的依赖性。
(2)基于几何的网格变形法
-
这种方法主要关注网格的几何形状和拓扑结构,通过调整网格的顶点位置或改变网格的拓扑关系来实现变形。常见的几何变形方法包括仿射变换、自由形式变形(FFD)等。 -
基于几何的网格变形法计算简单、易于实现,但变形效果可能不够逼真,且难以处理复杂的变形情况。
(3)基于优化的网格变形法
-
这种方法通过优化算法来求解变形后的网格形状。例如,可以利用能量最小化原理或形状匹配算法来找到最优的变形方案。 -
基于优化的网格变形法通常具有较高的计算效率和变形精度,但需要定义合适的优化目标和约束条件。
(4)基于学习的网格变形法
-
随着机器学习技术的不断发展,基于学习的网格变形法逐渐兴起。这种方法通过训练神经网络来预测变形后的网格形状,可以实现对复杂变形情况的快速处理和逼真模拟。
-
基于学习的网格变形法具有强大的泛化能力和适应性,但需要大量的训练数据和计算资源。
3、实施步骤
-
建立初始网格:根据叶片的几何形状,构建初始的网格模型。
-
定义变形规则:根据桨叶角的变化规律,设定网格节点的移动路径和速度。
-
执行变形:在仿真过程中,根据旋翼的倾转角度,实时调整网格形状。
-
流场计算:在变形后的网格上进行流体动力学计算,分析桨叶角变化对飞行性能的影响。
三、六自由度法:实现倾转旋翼机的起飞仿真
六自由度法(6 Degree of Freedom,简称6DoF)是描述物体在三维空间中运动状态的一种重要方法,它完整地表达了物体在空间中的位置和姿态。以下是对六自由度法的详细介绍,包括其基本原理、应用领域、技术细节以及未来发展趋势等方面。
1、六自由度法的基本原理
六自由度法基于物体在三维空间中可以进行的六种不同类型的独立运动,这些运动包括三个平移自由度和三个旋转自由度。
-
沿X轴平移(前进/后退):物体在水平面上沿着X轴向左或向右移动。
-
沿Y轴平移(左右位移):物体在水平面上沿着Y轴向前或向后移动。
-
沿Z轴平移(上下移动):物体在垂直面上沿着Z轴向上或向下移动。
-
绕X轴旋转(俯仰):物体绕着水平面上的X轴进行旋转。
-
绕Y轴旋转(偏航):物体绕着水平面上的Y轴进行旋转。
-
绕Z轴旋转(滚转):物体绕着垂直面上的Z轴进行旋转。
这六个自由度共同决定了物体在三维空间中的完整运动状态,包括其位置和方向。
2、六自由度法的应用领域
六自由度法在多个领域有着广泛的应用,包括但不限于:
-
在机械设计中,六自由度用于描述机械臂、机器人或其他机械装置的运动能力。设计者需要确保机械装置能够按照预定的路径和方式进行运动,同时避免不必要的运动,以保证操作的精确性和稳定性。
-
在飞行器的设计和飞行控制系统中,六自由度用于模拟和控制系统在空中的运动。飞行员通过操作控制杆和控制面,改变飞行器的姿态和位置,以实现精确的飞行控制。
-
模型建立:根据倾转旋翼机的物理参数,建立六自由度运动模型。
-
初始状态设定:确定飞行器的初始位置、速度、姿态等参数。
-
外力计算:计算作用于飞行器上的各种外力,包括重力、空气动力等。
-
运动方程求解:利用牛顿第二定律和动量矩定理,求解飞行器的运动方程,更新其位置和姿态。
-
结果验证:将仿真结果与实验数据或理论预测进行对比,验证模型的准确性和可靠性。

四、倾转旋翼无人机仿真关键技术精讲
倾转旋翼机仿真技术的每一次进步,都是对航空科技边界的勇敢探索。重叠网格法、网格变形法以及六自由度法,这些看似抽象的技术术语,实则承载着推动航空器设计、优化与性能评估的重要使命。随着计算能力的提升和仿真技术的不断革新,我们有理由相信,未来的倾转旋翼机将更加高效、安全、智能,为人类探索天空的梦想插上更加坚实的翅膀。
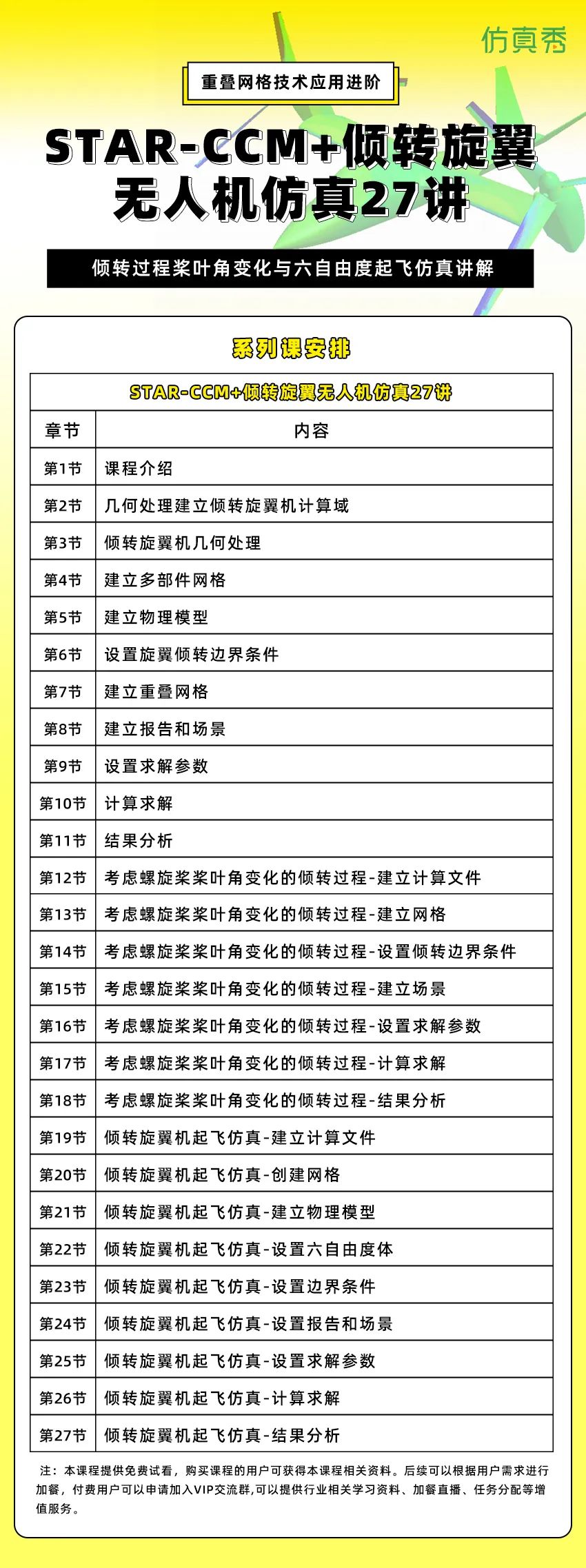
近日,有我原创独家首发仿真秀的视频教程《STAR-CCM倾转旋翼无人机仿真关键技术27讲》重点讲解重叠网格法、网格变形法及六自由度法,希望能够帮助学员掌握倾转旋翼无人机仿真关键技术。以下是课程大纲,欢迎联系官方客服加入VIP用户群交流。


扫码立即试看
1、您将得到
(2)掌握倾转旋翼机仿真流程
(3)掌握倾转旋翼机倾转过程桨叶角变化仿真能力
(4)掌握倾转旋翼机起飞仿真分析能力
(6)提供课程相关资料和VIP群答疑、奖学金、内推和免费加餐。
(1)理工科院校学生
(2)STAR-CCM 软件用户和学习者
(3)倾转旋翼机设计人员及工程师
[1] 德国机械研究委员会FKM零件应力强度分析评价导则培训
[3] “得标准者得天下”浅析德国FKM静强度和疲劳强度设计标准
[4] FKM规范在非焊接构件中的静强度评估方法介绍(上篇)
[6] FKM规范在非焊接构件中的疲劳强度评估方法介绍(上篇)
喜欢作者,请点赞和在看
回复 仿真秀资料包 下载

本篇文章来源于微信公众号: CFD之道







评论前必须登录!
注册