本文描述代数方程组求解中的两种基础迭代法:雅可比迭代法与高斯-赛德尔迭代法。
1 雅克比迭代法
代数方程组可以写成矩阵形式:
若系数矩阵的对角线元素不为0,则第一个方程可以用来求解,第二个方程可以用来求解,以此类推。该方法的第一步是给未知向量赋猜测值。基于这些猜测值计算新的近似值,首先是,然后,直到,这个过程表示一个迭代步。所得结果作为下一步迭代的新猜测值,并重复这个求解过程,直到两个连续迭代步之间解的变化小于一个近乎零的值,或者满足预先设定的收敛标准。此时,便得到了最终解。
在此方法中,若假定当前估计值为,则通过下式可以获得新的估计值:
式(2)表明,迭代中得到的值并不用于当前迭代步中的后续计算,而是保留到下一个迭代步才使用。利用矩阵表示方法,将式进行展开,其矩阵形式为
根据式(3)对进行求解,计算结果如下∶
系数矩阵写成下面的形式:
借助式(5),式(4)简写为:
矩阵是一个对角矩阵,其逆矩阵非常容易获取。
只要,雅可比方法就会收敛。包括对角占优矩阵在内的一大类矩阵都满足该条件,其中在对角占优矩阵中,系数满足:
2 高斯-赛德尔迭代法
高斯-赛德尔法是比雅可比迭代法更流行的一种迭代法,它具有更好的收敛性。因为它不需要将新的估计值存储在单独的数组中,因此它不需要占用太多的内存。准确地说,该方法在计算过程中使用的最新的可用估计值。
该方法的迭代公式为:
式(7)的矩阵形式可以写为:
矩阵是一个下三角矩阵,很容易求得其逆矩阵。
实际上,高斯-赛德尔法在迭代过程中一直使用最新的值,具体而言,这些最新的值是指$j
尽管在一些情况下,雅可比方法收敛速度更快,但是高斯-赛德尔法是优先选用的方法。
3 示例
分别采用高斯-赛德尔法和雅可比方法求解下面中的方程组,分别执行5个迭代步,并计算每个迭代步的结果与精确解的误差。已知精确解为
。
解:设初始值为
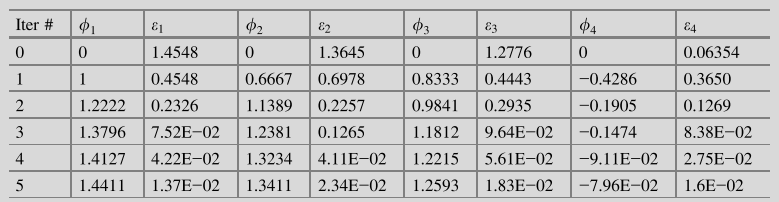
。用上标标记前一个迭代步的值,则雅克比方法的求解过程如下:
误差计算公式为。则第一迭代步的计算结果为:
注:这里的误差使用真值与当前迭代值的差值。实际迭代计算时使用的是当前迭代值与上一步迭代值的差值。因为在实际应用中,真值是未知的。
”
以相同的方式继续计算,并将上一个迭代步的结果作为下一个迭代步的猜测值,如下表所示。
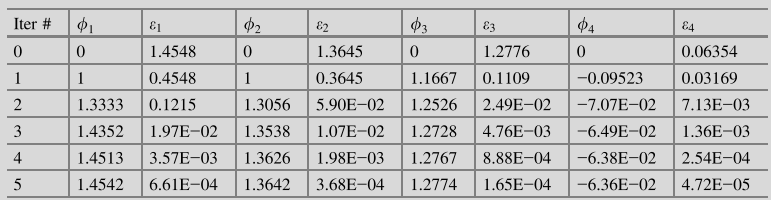
同样用上标标记前一个迭代步的值,高斯-赛德尔法的求解过程为:
第一个迭代步的计算结果:
重复相同的步骤进行计算,结果如下所示。
雅可比迭代法程序:
import numpy as np
# A为系数矩阵,b为结果矩阵
# k为最大迭代次数,tol为容差限
def Jacobi(A,b,k,tol):
n = A.shape[1]
D = np.eye(n)
D[np.arange(n),np.arange(n)] = A[np.arange(n),np.arange(n)]
LU = A - D
X = np.zeros(n)
# 迭代k次
for i in range(k):
X1= X.copy()
D_inv = np.linalg.inv(D)
X = -np.dot(np.dot(D_inv,LU),X) + np.dot(D_inv,b)
if(np.max(np.abs(X-X1)) print('计算收敛!')
break
print('n第',i,'次迭代:',X)
print('残差值为:',np.abs(X-X1))
print('当前最大残差为:', np.max(np.abs(X-X1)))
return X
A = np.array([
[3, -1, 0,0],
[-2, 6, -1,0],
[0,-2, 6,-1],
[0, 0, -2,7]
])
b = np.array([3, 4, 5, -3])
X = Jacobi(A, b, 1000,0.005)
输出结果为:
第 0 次迭代:[ 1. 0.66666667 0.83333333 -0.42857143]
残差值为:[1. 0.66666667 0.83333333 0.42857143]
当前最大残差为:1.0
第 1 次迭代:[ 1.22222222 1.13888889 0.98412698 -0.19047619]
残差值为:[0.22222222 0.47222222 0.15079365 0.23809524]
当前最大残差为:0.4722222222222222
第 2 次迭代:[ 1.37962963 1.23809524 1.18121693 -0.14739229]
残差值为:[0.15740741 0.09920635 0.19708995 0.0430839 ]
当前最大残差为:0.1970899470899471
第 3 次迭代:[ 1.41269841 1.3234127 1.22146636 -0.09108088]
残差值为:[0.03306878 0.08531746 0.04024943 0.05631141]
当前最大残差为:0.08531746031746001
第 4 次迭代:[ 1.44113757 1.34114386 1.25929075 -0.07958104]
残差值为:[0.02843915 0.01773117 0.03782439 0.01149984]
当前最大残差为:0.03782438901486507
第 5 次迭代:[ 1.44704795 1.35692765 1.26711778 -0.06877407]
残差值为:[0.00591039 0.01578378 0.00782703 0.01080697]
当前最大残差为:0.015783782648862044
第 6 次迭代:[ 1.45230922 1.36020228 1.2741802 -0.06653778]
残差值为:[0.00526126 0.00327463 0.00706242 0.00223629]
当前最大残差为:0.007062422264614288
计算收敛!
高斯-赛德尔迭代法程序:
import numpy as np
# A为系数矩阵,b为结果矩阵
# k为最大迭代次数,tol为容差限
def Jacobi(A,b,k,tol):
n = A.shape[1]
D = np.eye(n)
D[np.arange(n),np.arange(n)] = A[np.arange(n),np.arange(n)]
LU = A - D
# 得到LU的上、下三角矩阵
L = np.tril(LU)
U = np.triu(LU)
D_L = D + L
X = np.zeros(n)
# 迭代k次
for i in range(k):
X1= X.copy()
D_L_inv = np.linalg.inv(D_L)
X = -np.dot(np.dot(D_L_inv,U),X) + np.dot(D_L_inv,b)
if(np.max(np.abs(X-X1)) print('计算收敛!')
break
print('n第',i,'次迭代:',X)
print('残差值为:',np.abs(X-X1))
print('当前最大残差为:', np.max(np.abs(X-X1)))
return X
A = np.array([
[3, -1, 0,0],
[-2, 6, -1,0],
[0,-2, 6,-1],
[0, 0, -2,7]
])
b = np.array([3, 4, 5, -3])
X = Jacobi(A, b, 1000,0.001)
输出结果为:
第 0 次迭代:[ 1. 1. 1.16666667 -0.0952381 ]
残差值为:[1. 1. 1.16666667 0.0952381 ]
当前最大残差为:1.1666666666666665
第 1 次迭代:[ 1.33333333 1.30555556 1.2526455 -0.07067271]
残差值为:[0.33333333 0.30555556 0.08597884 0.02456538]
当前最大残差为:0.33333333333333326
第 2 次迭代:[ 1.43518519 1.35383598 1.27283321 -0.0649048 ]
残差值为:[0.10185185 0.04828042 0.0201877 0.00576792]
当前最大残差为:0.10185185185185186
第 3 次迭代:[ 1.45127866 1.36256509 1.27670423 -0.06379879]
残差值为:[0.01609347 0.00872911 0.00387102 0.00110601]
当前最大残差为:0.016093474426807752
第 4 次迭代:[ 1.45418836 1.36418016 1.27742692 -0.06359231]
残差值为:[0.0029097 0.00161507 0.00072269 0.00020648]
当前最大残差为:0.002909702975840478
计算收敛!
注:本文内容采集自《The Finite Volume Method in Computational Fluid Dynamics》及《计算流体力学中的有限体积法》。
”
(完)
本篇文章来源于微信公众号: CFD之道






评论前必须登录!
注册