上一篇文章(SRF、壁面运动及动网格)中探讨了SRF与动网格的区别。本文在前一篇文章的基础上进一步对比并探讨MRF、SMM以及重叠网格的差异。
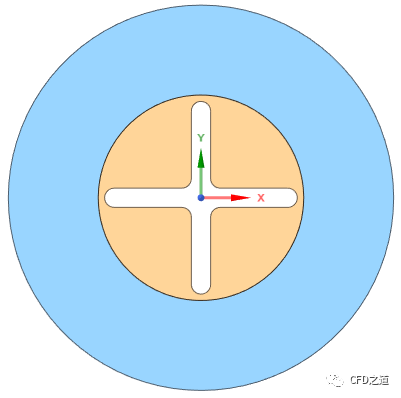
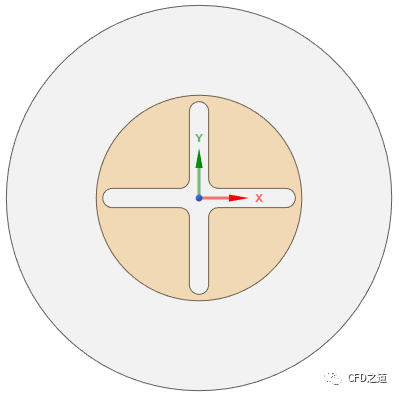
还是上篇文章中的几何,如下图所示。密闭容器中包含一个以角速度200 RPM的十字桨叶。本次比较采用MRF、滑移网格以及重叠网格时计算结果的差异。
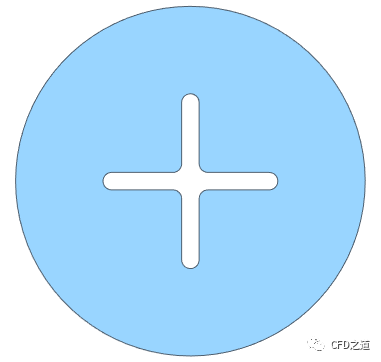
注意,重叠网格采用的方案与MRF及滑移网格不同,其需要准备两套计算网格。
1 计算网格
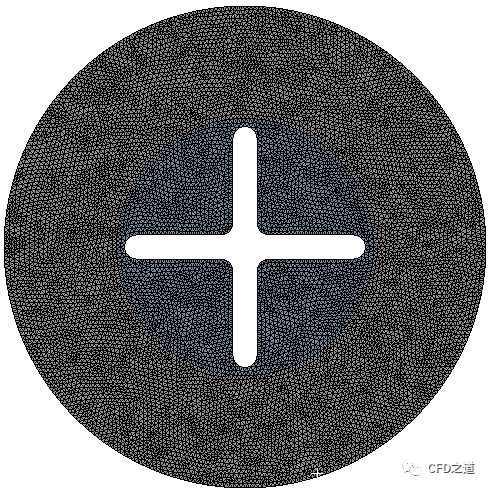
MRF及滑移网格计算采用的网格如下图所示。
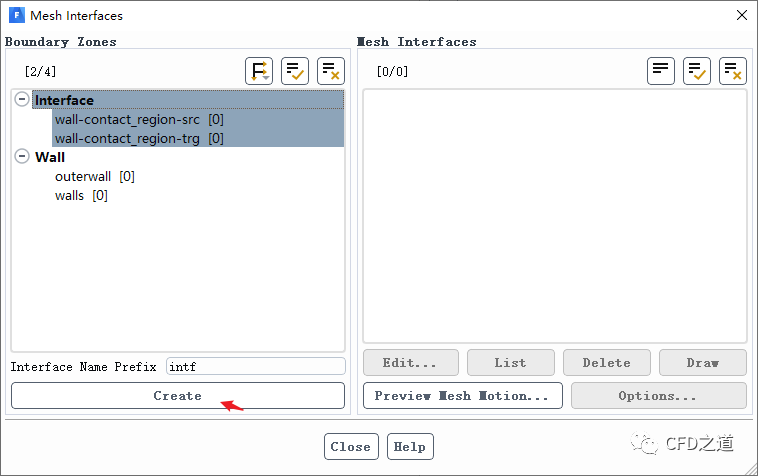
需要注意的是,滑移网格必须使用交界面,否则会提示出现负体积。MRF模型可以使用内部面也可以使用交界面(推荐使用内部面)。为了便于比较,全部使用interface。交界面的位置取距离桨叶最远端附近(其实很容易理解,交界面取得更远等同于使用SRF)。
注:不过交界面会造成较大误差,也不宜放置在桨叶前端附近,这里只是测试分界面距离运动边界过近会有什么后果。通常情况下将分界面放置在桨叶前端与壁面的中间位置,尽量避免分界面对桨叶前端及壁面造成扰动,但是也要尽可能减少将静止区域人为指定为动区域。
”
为确保产生interface,在SCDM中不要对几何进行共享拓扑。将内部区域命名为inner,外部区域命名为outer。为了与前文动网格结果进行比较,这里也采用三角形网格划分,并采用相同的网格尺寸。生成的计算网格如下图所示。
2 MRF计算
-
稳态数据 -
采用RNG K-Epsilon湍流模型 -
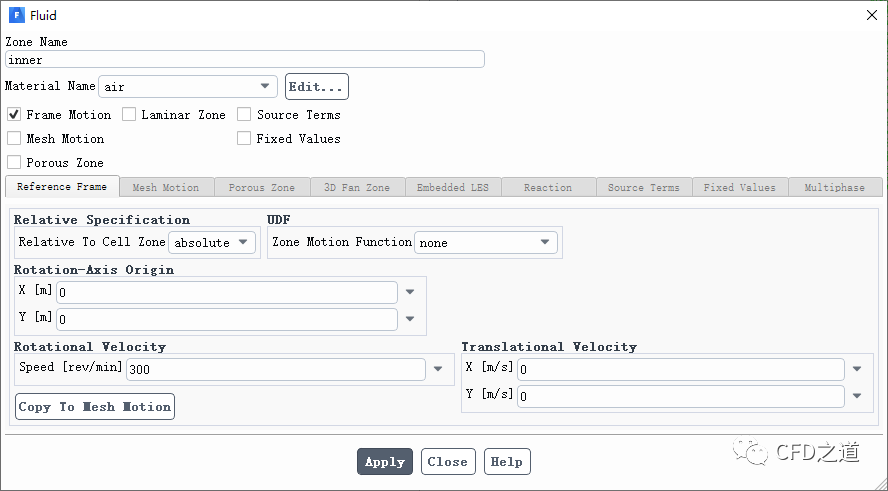
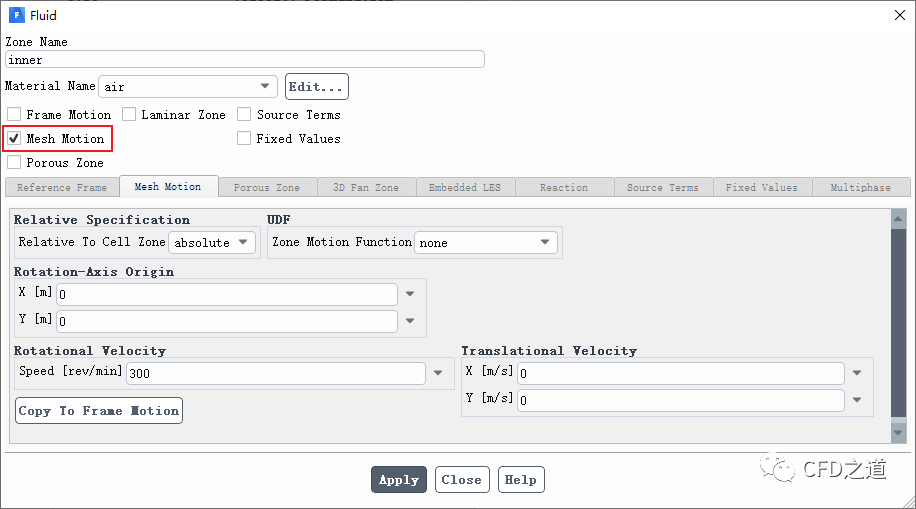
采用MRF模型,指定内部区域角速度为300 RPM
-
创建分界面
-
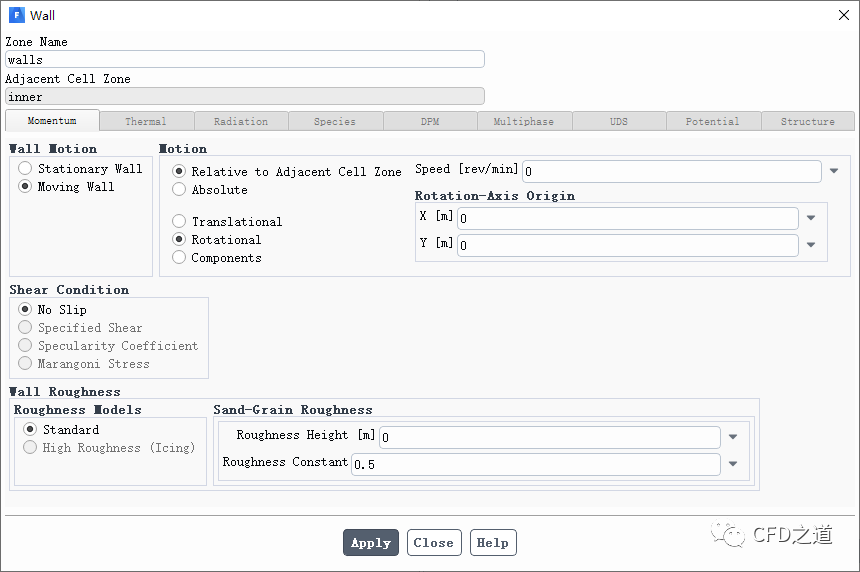
设置桨叶壁面速度为相对区域速度为0
-
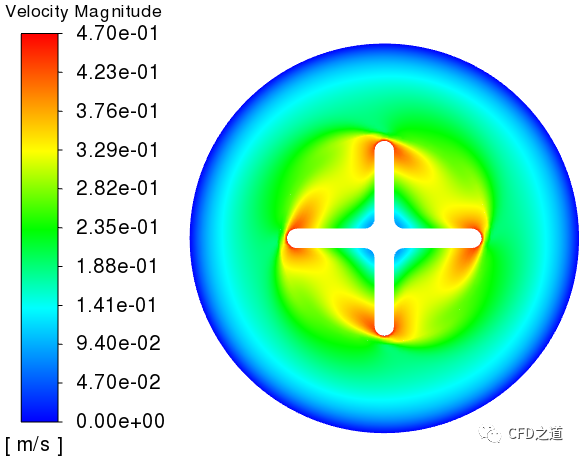
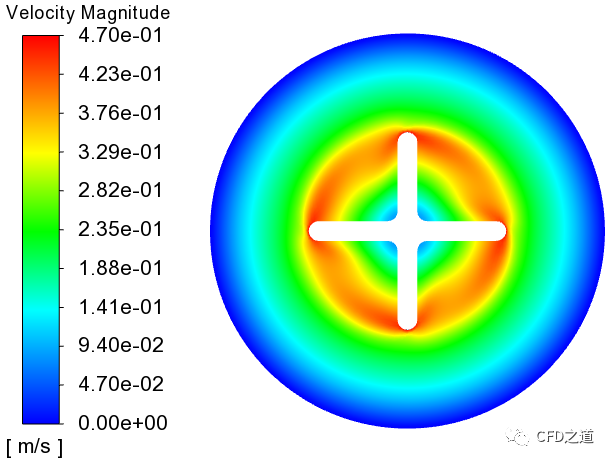
计算得到的速度分布(残差收敛到1e-7)
3 滑移网格
滑移网格需要计算瞬态,这里可以在MRF基础上进行修改计算。
-
选择Transient进行瞬态计算 -
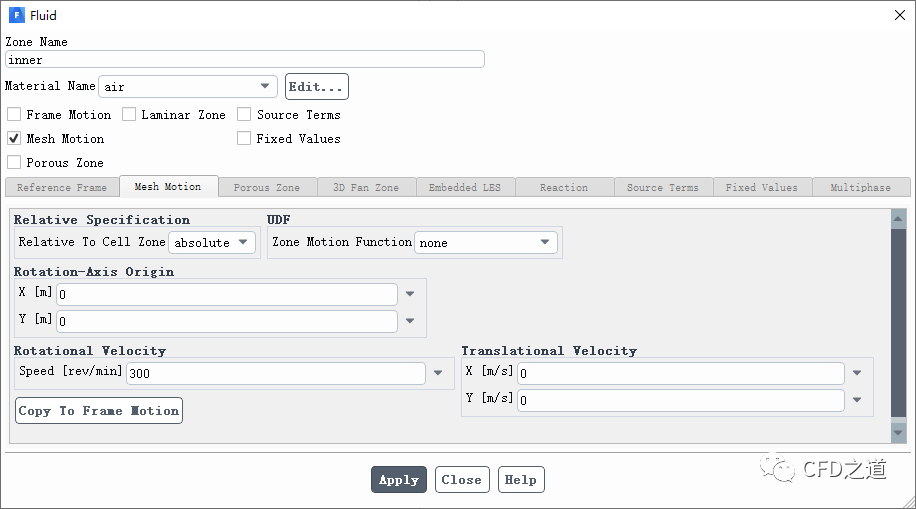
指定inner区域运动为Mesh Motion,并指定其旋转速度为300 RPM
-
速度动画如下图所示

4 重叠网格
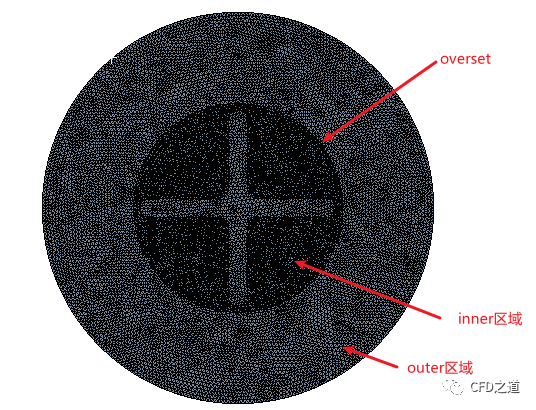
重叠网格的几何与前面MRF及滑移网格不同,其需要两个重叠在一起的独立几何,并分别划分计算网格。
为了便于比较,这里采用了三角形网格,网格尺寸与前面保持一致。生成计算网格如下图所示。
-
激活Transient采用瞬态计算 -
指定前景网格区域inner旋转角速度为300 rpm
-
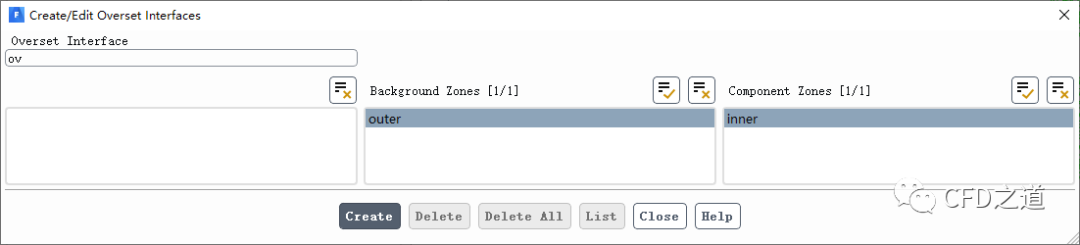
定义重叠网格区域
-
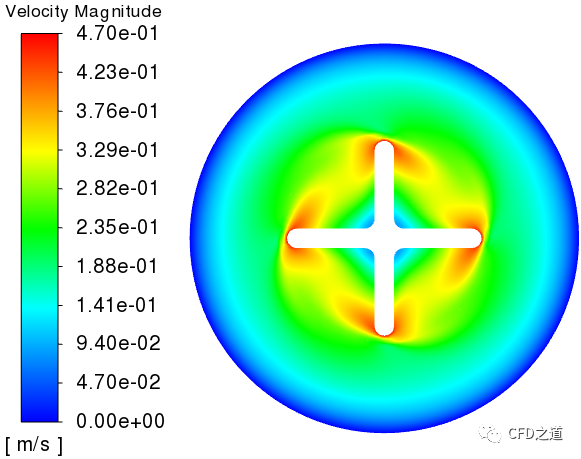
计算结果如下图所示

注:重叠网格开启了并行计算就出错,用1个CPU就没问题。现在不清楚是软件安装有问题还是版本有问题。
”
5 总结
下面是相同的工况条件下分别使用SRF、MRF、SMM、动网格以及滑移网格得到的结果。放在一起便于比较。
-
SRF计算结果
-
MRF计算结果
-
滑移网格计算结果

-
动网格计算结果

-
重叠网格计算结果

注:上面的动图中桨叶旋转快慢不同是由于截图采用的帧率不同所造成。
”
以动网格结果作为目标(毕竟与真实工况最吻合),从上面的计算结果来看:
-
对于文中所示的旋转运动,上面所有的方法其实都是可以使用的 -
稳态计算时MRF要好于SRF,原因在于SRF将更多原本为静止的区域处理成了运动区域,而MRF可以缩小这些区域的范围 -
瞬态计算时优先选用滑移网格,能最大程度保证网格质量。不过滑移网格需要使用interface,在计算时依然存在插值 -
重叠网格计算精度并不高,因为重叠域内需要不断插值,不过好在重叠网格不需要担心网格运动带来的负体积问题 -
动网格是与实际工况最为符合的,不过动网格方法在运动时网格质量会变得很差
相关文件:
本篇文章来源于微信公众号: CFD之道





评论前必须登录!
注册